

Сенсорные Модули
Формирование сигнала для различных преобразователей (инкрементальный преобразователь sin/cos 1 Vpp, абсолютный преобразователь, резольвер) имеет место удаленно , то есть поблизости от датчиков с помощью сенсорных модулей. Оценка датчика и функции идентификации двигателя интегрированы как стандартные функции в DRIVE-CLiQ интерфейс двигателей 1FT6/1FT7/1FK7/1PH7/1PM4/1PM6. Внешние сенсорные модули SME120/SME125 предусмотрены для линейных двигателей 1FN3 и для моментных двигателей 1FW6. Внешние сенсорные модули SME120/SME125 степени защиты IP67 предусмотрены для прямых измерительных систем для непосредственной установки рядом с двигателем.Эти двигатели могут напрямую быть соединены с помощью разъёма DRIVE-CLiQ (в дополнение к силовому разъёму). Поэтому не требуется специальный кабель датчика.
В зависисмости от типа измерительной системы двигателя без DRIVE-CLiQ разъёма различные сенсорные модули могут быть установлены в электрический шкаф. Сенсорные Модули SMC10, SMC20 или SMC30 монтируются на рейках DIN. Они также используются для формирования сигнала внешних (машинных) датчиков.
Модули расширения
Интерфейсы и разъёмы для связи с двигателями и двигательными системами стандартно присутствуют в блоке управления CU320, в SINUMERIK solution line NCU модуле и в опциональном модуле расширения NX10/NX15. SINAMICS S120 предлагает следующие модули расширения:
- TM15 Terminal Module (дополнительные входы выходы)
- TB30 Terminal Board (модуль расширения для установки в опциональный слот блока управления CU320)
- DRIVE-CLiQ Hub DMC20 для увеличения числа интерфейсов DRIVE-CLiQ на блоке управления и двигательных модулях и для объединения кабелей DRIVE-CLiQ от двигателей
При использовании модулей расширения необходимо учитывать следующее:
- Только один вспомогательный модуль может быть подключён к вспомогательному слоту Блока Управления CU320.
- В группе приводов может присутствовать не больше 8 Терминальных Модулей.
Модули Торможения и тормозные резисторы
Блоки торможения состоят из Модуля Торможения и тормозного резистора, которые должны подключаться внешним образом.
Блоки торможения используются, когда
- регенеративная энергия появляется иногда и ненадолго, например, когда привод останавливается (АВАРИЙНАЯ ОСТАНОВКА), а привод не снабжён регенеративной обратной связью
- привод включает блоки регенеративной обратной связи, но не может достаточно быстро вернуть энергию при «АВАРИЙНОЙ ОСТАНОВКЕ»
- привод необходимо отключить при неисправности сети питания
Блоки торможения для Силовых Модулей книжного формата состоят только из тормозных резисторов, т.к. их стандартная комплектация уже включает Модуль Торможения.
Некоторое количество Модулей Торможения может быть параллельно подключено к звену постоянного тока для увеличения тормозной мощности. Каждый Модуль Торможения требует наличия собственного тормозного резистора. Не допускается использовать комбинации блоков торможения формата книги и шасси в одной и той же цепи DC.
Требуемая тормозная мощность рассчитывается на основе мощности Pd в цепи DC группы приводов или Силового Модуля при работе генератора.
Максимальное число моулей торможения в группе приводов зависит от ёмкости звена постоянного тока приводной конфигурации. Один модуль томожения может быть использован для емкости звена постоянного тока в 0.5 мкФ.
Модули торможения и тормозтные резисторы книжного формата
Для работы Модулей Торможения формата книги требуется минимальное ёмкостное сопротивление в цепи DC. Это ёмкостное сопротивление определяется используемым тормозным резистором.
Тормозной резистор 0,3 кВт/25 кВт > ёмкость цепи DC 220 мкФ
Тормозной резистор 1,5 кВт/100 кВт > ёмкость цепи DC 330 мкФ
Ёмкостное сопротивление Модуля Торможения формата книги величиной в 110 мкФ включено в общее значение ёмкости. Если ёмкостное сопротивление цепи DC недостаточно для использования одного или нескольких Модулей Торможения, для увеличения эффективной ёмкости цепи DC для группы приводов может быть добавлен Модуль Ёмкости.
Когда Модули Торможения формата книги подключены параллельно, минимальное ёмкостное сопротивление, указанное выше, должно быть обеспечено для каждого Модуля Торможения.
Замечание:
Только модули книжного формата, напрямую подключённые друг к другу через основную шину цепи DC, могут быть включены в общую ёмкость.
Должна учитываться максимально допустимая ёмкость цепи DC группы приводов на Модуле питания. Максимальные ёмкостные сопротивления, которые должны учитываться для ограничения тока предварительной зарядки Модулей питания, приведены в технической документации по модулям питания.
Тормозной резистор производит отвод избыточной энергии из цепи DC:
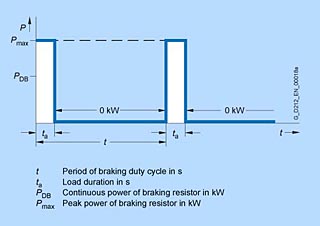
Рабочий цикл тормозных резисторов
Модули Торможения и тормозные резисторы для формата шасси
Модули Торможения с мощностью торможения в 25 кВт (для типа FX) и 50 кВт (для типов GX, HX и JX) доступны с соответствующими тормозными резисторами для блоков формата шасси. Для получения более высокой тормозной мощности блоки торможения могут быть подключены параллельно.
Существует функция мониторинга на интерфейсе Х21 тормозного модуля. На корпусе тормозного резистора установлен термоконтакт. Обе возможности могут быть использованы для встраивания сообщения или в цепь выключения приводной системы.
Рассчет требований для модулей торможения и тормозных резисторов.
- Для периодичных рабочих циклов с длительностью цикла 90 с, должно быть определено среднее значение тормозной мощности внутри данного рабочего цикла. В качестве временной развёртки должна использоваться длительность соответствующего цикла.
- Для периодичных рабочих циклов с длительностью цикла 90 с или для спорадических действий по торможению, должен быть выбран временной интервал в 90 с, который является наивысшим средним значением. В качестве временной развёртки должен использоваться временной интервал в 90 с.
При выборе блоков торможения (Модуля Торможения и тормозного резистора) кроме средней тормозной мощности должна учитываться и пиковая тормозная мощность.
Основные данные
|
Мощность двигательных модулей |
||
|---|---|---|
|
110 ... 132 кВт (148 ... 177 лс) |
160 ... 800 кВт (215 ... 1073 лс) |
|
|
Сетевое напряжение 380 ... 480 В |
||
|
Модуль торможения Постоянная мощность PDB |
25 кВт (33.5 лс) |
50 кВт (67.1 лс) |
|
Модуль торможения |
50 кВт (67.1 лс) |
100 кВт (134 лс) |
|
Модуль торможения |
100 кВт (134 лс) |
200 кВт (268 лс) |
|
Модуль торможения Пиковая мощность P15 |
125 кВт (168 лс) |
250 кВт (335 лс) |
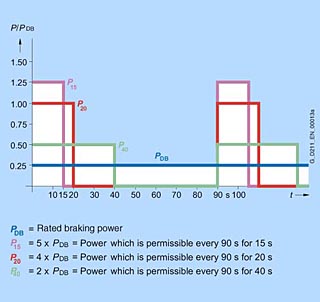
Диаграмма нагрузок
Тормозные резисторы для Силовых Модулей формата книги
Тормозные резисторы для размеров FSA и FSB разработаны как подструктурные компоненты. Тормозные резисторы для размеров от FSC до FSF должны монтироваться вне шкафа управления из-за их высокой теплоотдачи.
Блок Управления контролирует отношение импульс/пауза (время ВКЛЮЧЕНИЯ/время ВЫКЛЮЧЕНИЯ) тормозного резистора и выключает его в случае неисправностей или после расчёта, что резистор может перегреться.
Тормозные резисторы содержат температурный выключатель с нормально замкнутыми контактами, которые размыкаются, когда превышена допустимая температура. Состояние температурного выключателя должно регулярно проверяться, чтобы исключить повреждение тормозного резистора из-за перегрева.
Pmech на валу двигателя больше, чем потеря мощности тормозным резистором, т.к. в данном случае необходимо только преобразовать энергию в цепи DC в тепло. Мощность цепи DC Pd Силового Модуля в режиме генератора рассчитывается из мощности на валу двигателя Pmech, потери мощности двигателем Pv Motor и в Силовом Модуле Pv Power Module следующим образом:
Тормозная мощность Pmech на валу двигателя больше, чем потеря мощности тормозным резистором, т.к. в данном случае необходимо только преобразовать энергию в цепи DC в тепло. Мощность цепи DCPd Силового Модуля в режиме генератора рассчитывается из мощности на валу двигателяPmech потери мощности двигателемPv Motor и в Силовом Модуле Pv Power Module следующим образом:
P d = Pmech – Pv Motor – Pv Power Module = Pbraking resistor
Эти потери мощности могут быть определены из значений эффективности работы двигателя m и Силового Модуляwr:
P braking resistor = Pd = Pmech m wr
Модуль емкости формата книги
Модуль емкости работает как краткосрочный буфер энергии, например, для борьбы с короткими перебоями в подаче энергии или для сохранения энергии торможения. Буферная энергия W может быть рассчитана следующим образом:
W = C (Ud12 – Ud22)
C = эффективная емкость Модуля емкости 4 mF
U d1 = напряжение в цепи DC при начале буферизации
U d2 = напряжение в цепи DC при окончании буферизации
Пример:
U d1 = 600 В;Ud2 = 430 В
Результирующее значение энергииW = 350 Втсек
При помощи этой энергии можно, например, поддерживать работу Модуля Двигателя мощностью 3 кВт на протяжении приблизительно 100 мс.
Модуль Управления Питанием формата книги
Модуль Управления Питанием осуществляет подачу питания 24 В DC от сети или цепи DC для поддержания работы компонентов системы в случае неисправности в сети. Это позволяет, например, произвести необходимые действия в случае отсутствия подачи питания.
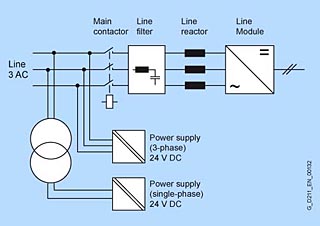
Внешнее питание компонентов от 24 В DC
Блоки питания (Модули питания и Модули Двигателя) и другие компоненты системы должны быть обеспечены 24 В напряжением DC через внешний источник подачи электропитания.
В качестве внешних источников электропитания 24 В DC рекомендуется использовать устройства SITOP, которые являются модульным решением.
Подключение внешнего источника электропитания
Потребность в токеIDC ext рассчитывается по следующей формуле:
[Блок Управления + встроенные функции (например, TM15 +DMC20+ CBE20) + компоненты системы + Модуль питания + (Модули Двигателя + SMCxx + управление торможением двигателя)]
Также должны учитываться и другие компоненты системы (например, линейный выключатель).
Потребности в токе отдельных компонентов можно найти в соответствующей технической документации.
Предельные значения для конфигурации:
- Максимальная пропускная способность по току встроенной шины 24 В DC (только в формате книги) составляет 20 А.
- В случае больших потребностей в токе, в одной группе приводов должны присутствовать несколько источников питания 24 В DC. Другие потребности в питании обеспечиваются 24-вольтными терминальными адаптерами (только в формате книги).
- Кабель с поперечным сечением до 2,5 мм может быть подключён к Блокам Питания, Распределительным Щиткам, Терминальным Модулям и Сенсорным Модулям.
- Кабель с поперечным сечением до 6 мм может быть подключён к 24-вольтным терминальным адаптерам (только в формате книги) для Модулей питания и Модулей Двигателя. Для этой цели разработано место подключения с левой стороны каждого модуля.
- Внешний источник питания 24 В DC должен использоваться только для компонентов SINAMICS и непосредственной нагрузки.
Ёмкостные конденсаторы большинства компонентов должны быть заряжены, когда подача питания 24 В DC включается в первый раз. Для зарядки этих конденсаторов от источника питания сначала должен поступить пиковый ток, который может составлять основу требований по токуIDC ext , рассчитанных выше. Этот пиковый ток должен учитываться при выборе защитных элементов, например, миниатюрных автоматических выключателей для подключения к источнику питания 24 В DC (типы с пропускными значениями I2 t в соответствии с характеристикой D). Пиковый ток наблюдается в течение промежутка времени te, меньшем, чем 100 мс. Предельное значение определяется по импедансу источника 24 В DC и его максимальному току, ограниченному электроникой
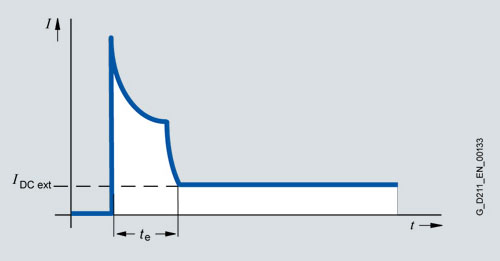
Типичная форма колебания тока при подключении к источнику 24 В DC