

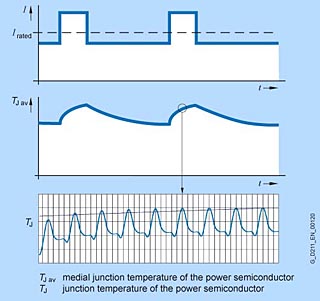
Способность выдерживать перегрузки
Блоки питания, Модули Двигателя и Силовые Модули разработаны для кратких перегрузок, т.е. в течение коротких промежутков времени Модули способны выдавать больше, чем номинальный ток /rated. В данном случае используется теплоаккумулирующая способность теплопоглощающего устройства, что обеспечивает соответствующие тепловые константы времени. Силовые полупроводники и цепь токового считывания оцениваются значением максимального тока /max, которое не должно превышаться. Способность выдерживать перегрузки определяется /max, /rated и тепловыми константами времени. Количество рабочих циклов указано в технической документации к блокам питания. Утилита конфигурации SIZER рассчитывает нагрузку на основе указанного рабочего цикла с вспомогательными временными характеристиками, а затем определяет требуемый блок питания.
Снижение номинальных значений характеристических кривых
Блоки питания могут работать с номинальным током или мощностью и указанной частотой следования импульсов при внешней температуре, не превышающей 40 °C (104°F). В данной рабочей точке теплопоглощающее устройство достигает максимально допустимой температуры. Если внешняя температура превысит 40 °C (104°F), то для предотвращения перегрева теплопоглощающего устройства должна быть снижена теплоотдача.
При заданном токе теплоотдача увеличивается пропорционально частоте следования импульсов. Чтобы не превысить максимальную теплоотдачу и температуру теплопоглощающего устройства для более высоких частот следования импульсов, номиныльный выходной ток /rated должен быть понижен. Когда для частоты следования импульсов применяется поправочный коэффициент kf, значение номинального выходного тока / ratedfприводится в соответствие выбранной частоте следования импульсов.
При настройке привода обратите внимание, что блоки питания могут не обеспечивать в полном объёме заявленной величины тока или мощности при температуре от 40 °C (104°F) до 55 °C (131°F). Блоки питания определяют температуру теплопоглощающего устройства и защищают себя от тепловой перегрузки при температурах > 40 °C (104°F).
Давление воздуха, а вследствие этого и плотность воздуха, снижаются на высотах выше уровня моря. На данных высотах то же количество воздуха не обеспечивает того же охлаждающего эффекта, а воздушный зазор между двумя электрическими проводниками может предохранять только от низкого напряжения. Типичные значения давления воздуха:
0 м над уровнем моря: 100 кПа
2000 м (6562 футов) над уровнем моря: 80 кПа
3000 м (9843 футов) над уровнем моря: 70 кПа
4000 м (13124 футов) над уровнем моря: 62 кПа
5000 м (16405 футов) над уровнем моря: 54 кПа
При установке на высоте выше 2000 м (6562 футов), линейное напряжение не должно превышать заданных значений, чтобы обеспечить защиту от бросков напряжения в соответствии с EN 60664 1 для бросков напряжения категории III. Если на высоте > 2000 м (6562 футов) линейное напряжение превышает заданный предел, то должны быть приняты меры для снижения переходных бросков напряжения категории III до значений категории II, например, оборудование должно содержать изолирующий трансформатор.
Для расчета допустимого выходного тока или мощности, коэффициенты снижения номинальных значений должны быть умножены на эффекты, описанные выше. Коэффициент снижения номинального значения тока kI как функция высоты установки может быть измерен при помощи коэффициента снижения номинального значения внешней температуры kT. Если результат умножения коэффициента kT на коэффициент kIбольше 1, тогда расчет должен базироваться на номинальном токе /rated или /ratedf. Если результат <1, тогда для расчета максимально допустимого значения непрерывного тока он должен быть умножен на значение номинального тока /rated или /ratedf. Рассчитанный данным способом для получения результирующего значения коэффициент снижения номинальных значений k = kf kT kI должен применяться ко всем значениям тока (/rated, /H, /L) в заданном рабочем цикле.
Характеристика снижения номинальных значений Силовых Модулей, Модулей Линии и Модулей Двигателя приведена в технической документации соответствующего Модуля (смотрите описание компонента).
Примеры характеристических кривых снижения номинальных значений и расчета допустимого выходного тока:
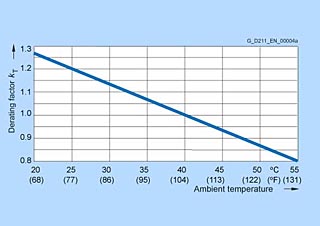
Снижение номинальных значений тока как функция внешней температуры
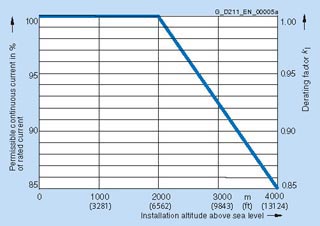
Снижение номинальных значений тока как функция высоты установки

Снижение номинальных значений напряжения как функция высоты установки
Пример 1
Система привода работает на высоте 2500 м (8202,5 футов) при максимальной внешней температуре в 30 °C (86°F) и заданной частоте следования импульсов.
Так как внешняя температура ниже 40 °C (104°F), может быть применен компенсационный расчет (высота установки/внешняя температура).
Высота установки 2500 м (8202,5 футов): Коэффициент снижения значений kI = 0,965, kU = 0,94
Максимальная внешняя температура 30 °C (86°F): Коэффициент снижения значений kT = 1,133
k I kT = 0.965 1.133 = 1.093 1.0 из-за компенсации высота установки/внешняя температура
k = kf (kI kT) = 1.0 (1.0) = 1.0
Результат:Снижение номинальных значений тока не требуется.
Несмотря на это, IEC 60664 1 требует снижения номинальных значений напряжения.
Устройства в диапазоне напряжений от 380 В до 480 В могут использоваться с напряжениями до 480 В x 0,94 = 451 В, а устройства в диапазоне напряжений от 660 В до 690 В – 690 В 0,94 = 648 В.
Пример 2
Во время настройки привода был выбран Модуль Двигателя с номером 6SL3320 1TE32 1AA0 (номинальный выходной ток 210A, базовый ток нагрузки при больших перегрузках 178 A). Привод должен работать на высоте 3000 м (9843 фт), где внешняя температура может достигать 35 °C (95°F). Для обеспечения требуемой динамической характеристики частота следования импульсов должна быть установлена равной 4 КГц.
Высота установки 3000 м (9843 фт): Коэффициент снижения значений kI = 0,925, kU = 0,88
Максимальная внешняя температура 35 °C (95°F): Коэффициент снижения значений kT = 1,066
k I kT = 0.925 1.066 = 0.987 не полностью компенсируется значением высота установки/внешняя температура
k = kf (kI kT) = 0.82 (0.925 1.066) = 0.809
Результат: Требуется снижение номинальных значений тока.
Если применяются данные ограничения,
- Максимально допустимый непрерывный ток Модуля Двигателя: 210 A 0.809 = 170 A
- Базовый ток нагрузки при больших перегрузках: 178 A 0.809 144 A
IEC 60664 1 требует снижения номинальных значений напряжения.
Выбранный блок может работать с напряжением до 480 В 3 переменного тока 0,88 или 720 В DC 0,88 = 422 В 3 переменного тока или 634 В DC, т.е. при данных условиях 400-вольтный асинхронный двигатель (индукционный двигатель) может работать без ограничений. Несмотря на это, из-за высоты установки может потребоваться снижение номинальных значений асинхронного двигателя (индукционного двигателя).
Выбор Силового Модуля или Модуля Двигателя
Первоначально Модуль Двигателя выбирается на основе тока покоя I0 100 K (номинальный ток для повышения на 100 К температуры обмотки) для синхронных двигателей (индукционных двигателей) и номинального тока /rated для асинхронных двигателей (индукционных двигателей), как указано в описании двигателя. Динамические перегрузки, например, во время ускорения, должны учитываться в рабочих циклах, и могут потребовать установки более мощного Силового Модуля или Модуля Двигателя. В данном случае важно помнить, что выходной ток Силового Модуля или Модуля Двигателя снижается из-за высоты установки, внешней температуры и установленной частоты следования импульсов (смотрите описание коэффициентов снижения номинальных значений).
Для оптимальной настройки, среднеквадратическое значение тока двигателя /load, рассчитанное для рабочего цикла, дублируется на Силовом Модуле или Модуле Двигателя. Накладывается ограничение:
I rated, module Iload
I rated, module = допустимое значение непрерывного тока Силового Модуля или Модуля Двигателя, учитывая коэффициенты снижения номинальных значений.
Может потребоваться, чтобы в течение указанных промежутков времени Силовые Модули или Модули Двигателя обеспечивали больший по значению выходной ток. При настройке перегрузки налагаются следующие ограничения:
I rated, module коэффициент перегрузки < Ioverload
Коэффициент перегрузки = отношениеIrated, module/Imax, учитывая переключение циклов (смотрите описание компонентов)
Утилита SIZER способна выполнять точные расчеты перегрузки.
Номинальный ток – допустимые и недопустимые сочетания двигатель/преобразователь частоты
- Номинальный ток двигателя больше, чем номинальный выходной ток Силового Модуля или Модуля Двигателя:
В случаях, когда должен быть подключен двигатель с большим значением номинального тока, чем номинальный выходной ток Силового Модуля или Модуля Двигателя, двигатель сможет работать только с частичной нагрузкой. Налагается следующее ограничение:
Кратковременный ток (=1,5 базовый ток нагрузки IH) должен быть больше или равен номинальному значению тока подключенного двигателя.
Соблюдение данного правила крайне важно, так как низкая индуктивность рассеивания больших двигателей вызывает появление пиковых токов, которые могут вызвать отключение системы приводов или продолжительное ограничение выходного тока внутренними электронными схемами. - Номинальный ток двигателя значительно ниже, чем номинальный выходной ток Силового Модуля или Модуля Двигателя:
При использовании Векторной бессенсорной системы управления, номинальный ток двигателя должен составлять как минимум от номинального выходного тока Силового Модуля или Модуля Двигателя. При меньших токах двигателя привод может работать в векторно-частотном режиме управления.
Используя широтно-импульсную модуляцию, Силовые Модули или Модули Двигателей генерируют из напряжения DC напряжение переменного тока, подаваемое подключенному двигателю. Величина постапающего напряжения DC определяется линейным напряжением и, в случае Модуля Двигателя, Модулем Линии и, таким образом, максимально допустимым выходным напряжением (смотрите описание компонентов). Скорость и нагрузка подключенного двигателя определяют требуемое напряжение двигателя. Максимально возможное выходное напряжение должно быть больше или равно требуемому напряжению двигателя; возможно, потребуется выбрать двигатель с другой обмоткой.
Длинные кабели двигателя
Используя широтно-импульсную модуляцию, Силовые Модули или Модули Двигателей генерируют из напряжения DC напряжение переменного тока, подаваемое подключенному двигателю. Во время работы генерируются емкостные токи утечки, что ограничивает допустимую длину кабеля двигателя. Максимально допустимая длина кабеля указана в описании каждого Силового Модуля или Модуля Двигателя.
Реакторы двигателя ограничивают скорость нарастания и величину емкостных токов утечки, тем самым позволяя использовать более длинные кабели двигателя. Ёмкости реактора двигателя и кабеля двигателя образуют колебательный контур, который не должен подвергаться воздействию последовательности импульсов выходного напряжения. Поэтому резонансная частота данного колебательного контура должна быть значительно выше частоты следования импульсов. Чем длиннее кабель двигателя, тем больше должна быть его емкость и ниже резонансная частота. Для обеспечения достаточного предела безопасности между резонансной частотой и частотой следования импульсов, максимально допустимая длина кабеля двигателя ограничена, даже когда последовательно поключены несколько реакторов двигателя. Максимально допустимая длина кабеля при использовании реакторов двигателей приведена в техническом описании реакторов двигателей.
Модули Двигателя формата книги.
Если необходимо использовать длинный кабель двигателя, должен быть выбран более мощный Модуль Двигателя, или должно быть снижено отношение допустимого непрерывного выходного тока /continuous к номинальному выходному току /rated. Данные для конфигурирования Модулей Двигателя формата книги приведены в следующей таблице:
|
Модуль Двигателя |
Длина кабеля двигателя (с защитой) |
|||
|---|---|---|---|---|
|
Номинальный выходной токIrated |
> 50 ... 100 м(164 ... 328 ft) |
> 100 ... 150 м(328 ... 492 ft) |
> 150 ... 200 м(492 ... 656 ft) |
> 200 м (656 ft) |
|
3 A/5 A |
Используйте Модуль Двигателя 9 A |
Используйте Модуль Двигателя 9 A |
Не допускается |
Не допускается |
|
9 A |
Используйте Модуль Двигателя 18 A |
Используйте Модуль Двигателя 18 A |
Не допускается |
Не допускается |
|
18 A |
Используйте Модуль Двигателя 30 A или |
Используйте Модуль Двигателя 30 A |
Не допускается |
Не допускается |
|
30 A |
Допускается |
I
max 1.35 Irated |
I
max 1.1 Irated |
Не допускается |
|
45 A/60 A |
Допускается |
I
max 1.75 Irated |
I
max 1.5 Irated |
Не допускается |
|
85 A/132 A |
Допускается |
I
max 1.35 Irated |
I
max 1.1 Irated |
Не допускается |
|
200 A |
Допускается |
I
max 1.25 Irated |
I
max 1.1 Irated |
Не допускается |
Допустимая длина кабеля двигателя без защиты составляет 150% от длины кабеля двигателя с защитой.Чтобы использовать более длинные кабели двигателя, для двигателей, работающих в векторном и векторно-частотном режимах управления, допускается использование реакторов двигателя
Сетевые модули
В приложениях с многоосевыми приводами, несколько Модулей Двигателя работают в одной цепи DC, к которой подается питание от Модуля Линии.
Прежде всего, необходимо решить, какой Модуль Линии будет использоваться: Базовый (Basic), Интеллектуальный (Smart) или Активный (Active). Это зависит, с одной стороны, от способности привода к регенеративной обратной связи, а с другой стороны, от того, должна ли подача питания быть нерегулируемой и, таким образом, зависеть от напряжения источника питания, или регулируемой к постоянному напряжению цепи DC.
Модули Линии формата книги доступны в интеллектуальном и активном форматах и оба поддерживают регенеративную обратную связь.
Для расчета требуемой в цепи DC мощности и выбора правильного Модуля Линии, важно проанализировать всю последовательность работы группы приводов, подключенных к цепи DC. Также должны учитываться и такие факторы, как частичная нагрузка, избыточность, рабочие циклы, коэффициент одновременности нагрузки и рабочий режим (режим двигателя / генератора).
Мощность цепи DC Pd одного Модуля Двигателя, рассчитывается из мощности на валу двигателя Pmech и эффективности двигателяm и Модуля Двигателяwr.
В режиме двигателя накладываются следующие ограничения: Pd = Pmech / (mwr)
В режиме генератора накладываются следующие ограничения: Pd = Pmechmwr
Для расчета общей мощности цепи DC, мощности двигателя и генератора должны добавляться с соответствующим знаком.
Номинальная подаваемая мощность Модуля Линии относится к напряжению в сети в 380 В, 460 В или 690 В (690 В применяется только для Модулей Линии формата шасси). Колебания напряжения в сети могут повлиять на выходную мощность Модулей Линии. Несмотря на это, максимально возможная выходная мощность соответствует номинальной мощности блока соответствующего типа.
В зависимости от внешних условий (высота установки, внешняя температура), может потребоваться снизить подаваемую к Модулям Линии мощность (смотрите соответствующее описание).
Коэффициент одновременности нагрузки учитывает временную характеристику крутящего момента каждой отдельной оси.
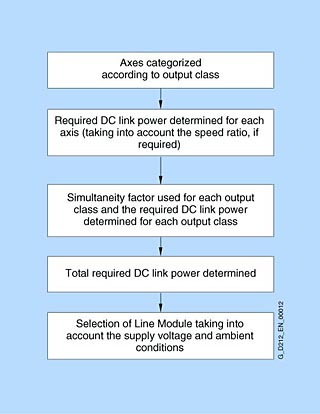
На основе этих принципов для определения величины Модуля Линии может быть использована следующая процедура:
При определении величины цепи DC должны также учитываться следующие факторы:
Для синхронных двигателей выбранных по циклу нагрузки с различным временем включения требуемая мощность звена постоянного тока равна рассчетной мощности умноженной на соотношение скоростей. Требуемая мощность звена постоянного тока меняется в зависимости от соотношения скоростей (отношение скорости нагрузки к номинальной скорости). Эмпирические значения представлены в таблице ниже:
- Для асинхронных двигателей выбранных по циклу нагрузки с различным временем включения номинальная мощность двигателя равна требуемой мощности звена постоянного тока.
- Для синхронных двигателей выбранных по циклу нагрузки с различным временем включения требуемая мощность звена постоянного тока равна рассчетной мощности умноженной на соотношение скоростей. Требуемая мощность звена постоянного тока меняется в зависимости от соотношения скоростей (отношение скорости нагрузки к номинальной скорости). Эмпирические значения представлены в таблице ниже:
|
Применение |
Соотношение скоростей n/nrated |
|---|---|
|
Синхронные двигатели/ привода подач низкоскоростных приводов |
0.4 ... 0.7 |
|
Привода роботов для высокоскоростных приводов |
0.9 ... 1 |
|
Асинхронные/ привода главного движенния для 1FT/1PH7/1FE1/1PM4/1PM6 двигателей |
1 |
- Для асинхронных и синхронных двигателей выбранных по циклу нагрузки с постоянным временем включения мощность рабочего режима или эффективная мощность берется в соответствии с кпд применяемого двигателя и двигательного модуля и рассчитывается как требуемая мощность звена постоянного тока.
Общее значение P calc для отдельных двигателей скорректированное на фактор одновременности и среднюю скорость является базой для выбора Модуля питания.
Рассчетная мощность синхронного двигателя
P calc FDD = 0.105 M0 nrated 10-3
P calc FDD Рассчетная мощность синхронного двигателя в кВт (лс)
0.105 фактор 2 /60
M 0 Статический момент в Нм (lbf-ft)
N rated номинальная скоростьв об/мин
Рассчетная мощность асинхронного двигателя
- Двигатели < 4 kW (5.36 HP)
Pcalc MSD = 1.45 Pmotor shaft MSD - Двигатели > 4 kW (5.36 HP)
Pcalc MSD = 1.25 Pmotor shaft MSD
P calc MSD Мощность звена постоянного тока приводав кВт (лс)
1.45 or 1.25 Фактор оценивающий эффективность двигателя
P motor shaft MSD Механическая мощность на валу двигателя в кВт (лс)
Номинальная входная мощность Модуля питания основана на сетевом напряжении в 380В. Если сетевое напряжение изменяется, то это может привести к изменению выходной мощности. Однако входная мощность не может превысить номинальной мощности.
В зависимости от условий внешней окружающей среды (высота установки, внешняя температура), номинальная входная мощность Модуля питания может уменьшиться (смотри описание компонентов).
Для оптимизации размеров Модуля питания должны быть учтены циклические характеристики индивидуальных осей. Предполагается, что асинхронные двигатели используются в качестве двигателей шпинделей и поэтому работают в постоянном режиме. Синхронные двигатели используются циклически (привода подач) - они не работают постоянно.
Фактор одновременности должен приниматься во внимание для определенного числа индивидуальных осей
Эмпирическое значение фактора одновременности:
|
Количество осей |
Фактор одновременности |
|---|---|
|
1 |
1 |
|
2 |
0.3 |
|
3 |
0.5 |
|
4 |
0.38 |
|
5 |
0.33 |
|
6 |
0.28 |
Для предотвращения неправильной конфигурации при использовании осей с различными значениями мощности, оси распределены по категориям в зависимост от их мощности.
Карта для упрощения рассчета мощности звена постоянного токаPDC link
|
Ось |
Двигатель |
n rated |
M |
I rated |
I
0
|
P calcFDD |
n/n rated |
P
calcFDD
|
|---|---|---|---|---|---|---|---|---|
|
об/мин |
Nm (lbf-ft) |
A |
A |
кВт (лс) |
кВт (лс) |
|||
|
Уровень I от 0 ... 1.8 кВт (2.41 лс) |
||||||||
|
1 |
|
|
|
|
|
|||
|
2 |
||||||||
|
3 |
||||||||
|
4 |
||||||||
|
5 |
||||||||
|
6 |
||||||||
|
Общая PcalcFDD Уровень I > |
|
|||||||
|
Уровень II от 1.8 ... 8.8 кВт (2.41 ... 11.8 лс) |
||||||||
|
1 |
||||||||
|
2 |
||||||||
|
3 |
||||||||
|
4 |
||||||||
|
5 |
||||||||
|
6 |
||||||||
|
Общая PcalcFDD Уровень II> |
|
|||||||
|
Уровень III от 8.8 ... 31 кВт (11.8 ... 41.6 лс) |
||||||||
|
1 |
||||||||
|
2 |
||||||||
|
3 |
||||||||
|
4 |
||||||||
|
5 |
||||||||
|
6 |
||||||||
|
Общая PcalcFDD Уровень III > |
|
|||||||
|
Уровень IV от 31 ... 50 кВт (41.6 ... 67.1 лс) |
||||||||
|
1 |
||||||||
|
2 |
||||||||
|
3 |
||||||||
|
4 |
||||||||
|
5 |
||||||||
|
6 |
||||||||
|
TotalPcalcFDD Уровень IV > |
|
|||||||
|
Уровень V от 50 ... 75 кВт (67.1 ... 101 лс) |
||||||||
|
1 |
||||||||
|
2 |
||||||||
|
3 |
||||||||
|
4 |
||||||||
|
5 |
||||||||
|
6 |
||||||||
|
ОбщаяPcalcFDD Уровень V > |
|
|||||||
|
Уровень VI от 75 ... 150 кВт (101 ... 201 лс) |
||||||||
|
1 |
||||||||
|
2 |
||||||||
|
3 |
||||||||
|
4 |
||||||||
|
5 |
||||||||
|
6 |
||||||||
|
ОбщаяPcalcFDD Уровень VI > |
|
|||||||
|
ОбщаяPcalcFDD |
|
Фактор одновременности |
|
|
|
P DC link FDD кВт (лс) |
|---|---|---|---|---|---|---|
|
Уровень I |
K I |
|||||
|
|
X |
= |
||||
|
Уровень II |
K II |
± |
||||
|
|
X |
= |
||||
|
Уровень III |
K III |
± |
||||
|
|
X |
= |
||||
|
Уровень IV |
K IV |
± |
||||
|
|
X |
= |
||||
|
Уровень V |
K V |
± |
||||
|
|
X |
= |
||||
|
Уровень VI |
K VI |
± |
||||
|
|
X |
= |
||||
|
Общая > |
x 1.1 = |
|||||
Следующие факторы также должны быть учтены при определении мощности:
- Торможение
Несмотря на то, что потери устройством мощности важны при работе в режиме двигателя, определение мощности, применяемое для режима двигателя, также применяется и для режима генератора. Учитывая операцию торможения двигателя, проверьте, чтобы энергия, подаваемая назад в цепь DC, не превышала величину пиковой нагрузки Модуля Линии.
Пиковая энергия рекуперации 0,9 (общая мощность всех осей).
В случае повышенной регенеративной выходной мощности , должен быть установлен Модуль Торможения, должен быть установлен Интеллектуальный или Активный Модуль другой мощности или установлено более длинное время торможения для снижения регенеративной выходной мощности.
Модуль торможения должен быть обеспечен для управления сценарием "ошибка сети".
Для настройки рабочего сценария «АВАРИЙНОЙ ОСТАНОВКИ» должен быть установлен Модуль питания другой мощности или использоваться дополнительный Модуль Торможения. Это позволит как можно быстрее рассеивать энергию цепи DC.
- Проверка ёмкости цепи DC
Во время включения питания Модули питания ограничивают зарядный ток для конденсаторов цепи DC. Из-за ограничений, накладываемых цепью предварительной зарядки, важно соблюдать максимально допустимые для группы приводов значения ёмкости цепи DC, приведённые в технической документации:
- Модули питания Smart 5 кВт и 10 кВт (6.71 лс и 13.4 лс) макс. 6 mF
- Модули питания от 16 кВт до 120 кВт (21.5 лс до 161 лс) макс. 20 mF
вы должны быть уверены что емкость звена постоянного тока не превышена для группы приводов. Значения емкостей цепи звена постоянного тока для компонентов представлено в описании компонентов для SINAMICS S120.
- Частота предварительной зарядки цепи DC
Частота предварительной зарядки звена постоянного тока через Модуль питания книжного формата рассчитывается при помощи следующей формулы:

Для сетевых модулей формата шасси максимально допустимый интервал предварительной зарядки звена постоянного тока составляет 3 минуты.
- Особые условия работы Модуля питания Smart
Модуль питания Smart работает с более низким напряжением звена постоянного тока нежели чем Активный модуль питания. Как результат, применяются следующие граничные условия:
- При использовании асинхронных двигателей (индуктивных двигателей), можно получить более низкую мощность двигателя при высокой скорости и том же напряжении сети.
- При использовании синхронных двигателей на высоких скоростях будет наблюдаться снижение динамических характеристик привода.
- При использовании синхронных двигателей, в случае, если требуется способность выдерживать перегрузки, номинальная скорость двигателя не может быть использована в полном объёме.
Модули питания Smart
Напряжению звена постоянного тока Ud Модулей питания Smart устанавливается среднее значение выпрямленного линейного напряжения UL, то есть Ud 1.35 UL
Из-за перепадов напряжения в линейном реакторе и питающем кабеле линии, напряжение звена постоянного тока снижается во время работы двигателя и увеличивается во время работы генератора. Таким образом, напряжение звена постоянного тока Ud находится в тех же пределах, что и для Базового Модуля питания:
1.41 UL > Ud > 1.32 UL (номинальная выходная мощность в режиме генератора > номинальная выходная мощность в режиме двигателя)
Активные модули питания
Напряжение цепи DC Ud является настраиваемым значением (Активный Режим). Активный Модуль питания может быть также переключён в Базовый Режим, после чего он станет работать как Базовый Модуль питания. В Активном Режиме Активный Модуль питания рисует виртуальную синусоиданую кривую тока, поступающего от системы подачи питания.
Управление вентилятором
Блоки книжного формата включают управляемый температурой вентилятор, предназначенный для охлаждения блока питания. Вентилятор не включается до тех пор, пока температура в теплопоглощающем устройстве не достигнет 56 °C (132,8°F). Вентилятор питается от внешнего источника питания 24-вольтной сети DC или от цепи DC при помощи включаемой подачи питания.
На блоках книжного формата и формата шасси вентилятор включается, когда включены импульсы блока питания.
Возмущение в системе
Снижение напряжения между системой электропитания и нагрузкой, обусловленное импедансом, наблюдается до тех пор, пока в цепи течет ток. В симметричной трехфазной системе электропитания это импеданс цепи Z n, который рассчитывается из импеданса Zs системы электропитания и импеданса Ze нагрузки.
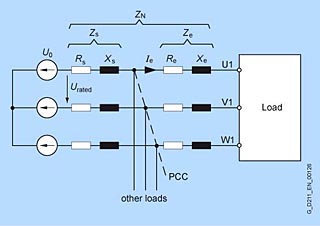
Эффективный импеданс, когда нагрузка подаётся к трёхфазной системе электропитания
Z n = Zs + Ze = Rs + j Xs + Re + j Xe = Rn + j Xn
На приводе с регулируемой частотой вращения импеданс Ze, как правило, является общим импедансом, подаваемым линейным реактором и силовым кабелем к PCC (Точке Общего Соединения) для последующего использования. Активной составляющей Rn обычно пренебрегают по сравнению с индуктивной составляющей Xn. Для данного вычисления индуктивность заградительного фильтра RI неважна, т.к. данная индуктивность имеет смысл только для асимметричных напряжений помех, но не для симметричного тока в цепи.
Если нагрузка вызывает падение напряжения, обусловленное импедансом Zs, возмущение в данной системе имеет влияние на РСС и, таким образом, на напряжение питания, используемом для всех других нагрузок.
Падение напряжения пропорционально току Ie и импедансу. Для облегчения сравнения падения напряжения при различных условиях электропитания и нагрузки, падение напряжение указывается – обычно для номинального тока – со ссылкой на фазное напряжение Uo. Формула расчёта, например, для падения напряжения uk, обусловленного импедансом Z, для каждого отдельного блока следующая:
u k = Z Ie / Uo
Пример 1:
Силовой Модуль с номинальным током Ie подключён напрямую к трансформатору низкого напряжения, а РСС – это клемма трансформатора. Формула, выражающая отношение между номинальным линейным током Ie Силового Модуля и номинальным током Irated трансформатора, следующая Ie = 0,25 Irated. Падение напряжения uk 400-вольтного трансформатора, рассчитанное для каждого блока, составляет 4%. Если в трансформаторе течёт номинальный ток Irated, падение напряжения, обусловленное импедансом Zs, составляет 9,2 В (что соответствует 4% фазного напряжения Uo = 230 В).
u k = (Zs Irated) / 230 V = 0.04
Следующая формула применяется к номинальному линейному току Ie Силового Модуля:Ie = k Irated
Таким образом, падение напряжения, обусловленное нагрузкой трансформатора током Ie и рассчитываемое для каждого отдельного блока, будет составлять:uk = Zs Ie / Uo = Zs k Irated / Uo
При указанном соотношении между Ie и Irated, падение напряжения uk = 1% или 2,3 В. По отношению к Силовому Модулю данный трансформатор работает как линейный импеданс в соответствии с uk = 1%.
Величина возмущения в системах преобразователя оценивается на основе отношения мощности короткого замыканияRsc:
R sc = Sc / P
В соответствии с данным определением, приведённым в EN 60146 1, P – это полная мощность основной гармоники преобразователя. Sc – это мощность короткого замыкания при подаче электропитания в случае короткого замыкания на контактах U1, V1 и W1. Так как на практике омическими составляющими импедансов принебрегают, тоZn j Xn
S c 3 Uo2 / Xn
и таким образомRsc 3 Uo2 / (Xn P)
Отношение Rsc мощности короткого замыкания, таким образом, зависит от текущей выходной мощности P преобразователя и определяется импедансом Xn в цепи.
Если мы предположим P 3 Uo Ie = v3 Urated Ie
Отношение Rsc мощности короткого замыкания неявно пропорционально падению напряжения uk, обусловленное импедансом в цепи.
R sc 3 Uo2 / (Xn P) = 3 Uo2 / (Xn 3 Uo Ie) = Uo / (Xn Ie) = 1 / uk
Например, для отношения мощности короткого замыкания, равного 1, Rsc 100, если не установлен линейный реактор (Ze = 0).
Замечание:
Понятие «отношение мощности короткого замыкания», используемое в технических стандартах, не является согласованным определением. Отношение Rsce мощности короткого замыкания, определяемое в соответствии с IEC 61000-3-12, рассчитывается из мощности короткого замыкания SSC в PCC по отношению к мощности Sequ = 3 Uo Ie, потребляемой полезной нагрузкой.
Модули питания Smart Силовые модули включают выпрямительный мост со стороны сети. Основными составляющими, участвующими в процессе выпрямления с нагрузочным ёмкостным сопротивлением для сглаживания напряжения в звене постоянного тока, являются гармоники тока в сети, которые вызывают несинусоидальный подвод мощности. Диаграмма отображает форму колебаний сигнала базового тока Силового Модуля или Базового Модуля питаниякак функцию отношения Rsc мощности короткого замыкания.
Активные Модули питания фактически не генерируют гармоник тока (Активный Режим) и используются, когда возмущения в системе должны минимизироваться, например, условие IEEE 519, что THD (Общее Гармоническое Искажение) должно быть < 10%.
Утилита конфигурации SIZER рассчитывает возмущение в системе на основе введённых исходных данных и отображает их в сравнении с предельными значениями соответствующих стандартов.
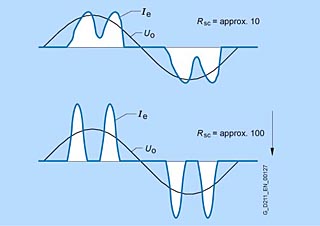
Ток в цепи Базового Модуля Линии или Силового Модуля как функция отношения Rsc мощности короткого замыкания
Среднеквадратичное значение линейного тока Ie, для которого должны оцениваться составляющие, состоит из основной гармоники Ie1 и гармоник тока, которые увеличивают отношение Rsc мощности короткого замыкания. Если была рассчитана мощность Pd в цепи DC (смотрите Модули питания), требуемая активная мощность является известной величиной эффективности Модуля питания или эффективности выпрямителя в случае Силового Модуля. Несмотря на это, активная мощность связана только с основной гармоникой тока Ie1. Среднеквадратичное значение линейного тока Ie всегда больше, чем Ie1 из-за воздействия гармоник тока. Следующее верно для отношения Rsc = 100 мощности короткого замыкания:
I e 1.3 Ie1
Полная мощность трансформатора, выбранного для подачи питания к приводу, должна быть больше, чем мощность привода, умноженная на коэффициент 1,3.
Гармонические токи создают только переменную мощность, но не активную мощность. Следующее верно для полной мощности S на стороне цепи:
S2 = P2 + Q12 + D2
- с активной составляющей
P = 3 Uo I1 cos 1, создаётся только основной гармоникой тока - и реактивной составляющей
Q1 = 3 Uo I1 sin 1 - и составляющей искажения

Отношение между активной мощностью и полной мощностью называется коэффициентом мощности или коэффициентом суммарной мощности:
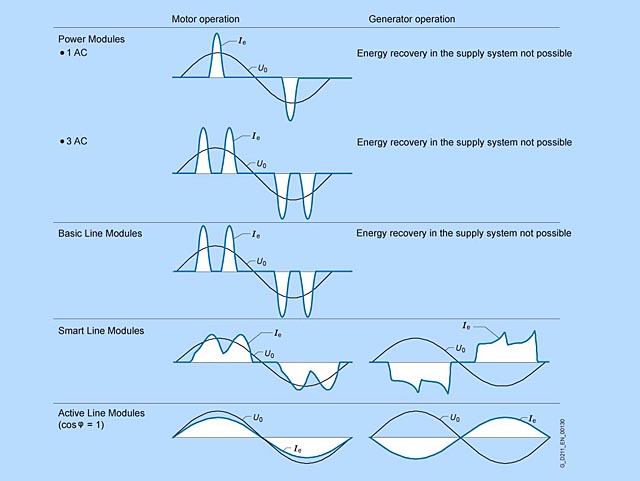
Типичная форма колебаний сигнала линейного тока Силовых Модулей и Модулей Линии
Компоненты цепи (главный выключатель, предохранители, сетевые фильтры и т.д.)
Для конфигурации привода рекомендуется использовать следующие компоненты:
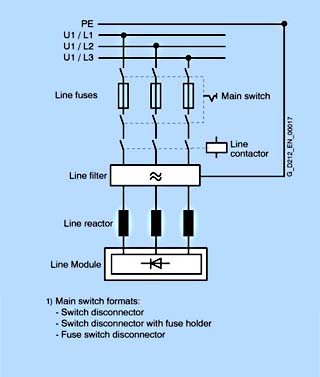
Главный выключатель может быть различных форматов:
- Главный выключатель АВАРИЙНОЙ ОСТАНОВКИ + прерыватель с предохранителем (с основным сигналом, поступающим через вспомогательный контакт для режима отключения)
- Прерыватель нагрузки с предохранителями
- Автоматический выключатель
Для защиты блоков от бросков напряжения рекомендуется устанавливать защиту от перенапряжения прямо на точку подачи питания (вверх по цепи от главного выключателя). Защита от перенапряжения необходима в соответствии с требованиями канадского стандарта CSA C22,2 No. 14. Для примеров использования предохранителей от перенапряжения посетите
http://www.raycap.com/
В зависимости от требуемой производительности, в качестве главного выключателя может выступать прерыватель с предохранителем вместе с замыкателем или автоматическим выключателем.
Замыкатель цепи может использоваться, если, например, привод должен быть отключён от цепи подачи питания в случае ошибки или для дистанционного выключения. Следуйте инструкциям, приведённым в Руководствах по Настройке SINAMICS S120 для блокировки замыкателя цепи в контексте функций безопасности.
Каждый станок должен быть оборудован как минимум одним разрывателем который обеспечит электрическую развязку от питания сети. Обычно это достигается установкой главного выключателя. Эта мера продосторожности защищает персонал от электрического удара когда он работает с оборудованием Необходимо запирать выключатель в открытом состоянии для защиты от несанкционированного включения.
Сетевой контактор может быть использован для изоляции преобразователя от сетевого питания. По отношению к преобразователю эта мера предосторожности соответствует категории останова 0. Для аварийного останова движущий момент двигателя/преобразователя должен быть остановлен по категории 1. Однако, аварийный останов не требует от привода быть отключенным от питания. В комбинации возможностей SINUMERIK 840D sl и SINAMICS S120 включена интегрированная функция Безопасного останова , которая может быть активирована независимо и со стороны привода и со стороны NC. индивидуальные меры предосторожности должны быть предусмотрены для выполнения целостной системы безопасности которая полностью обеспечивает требования аварийного останова. Отключение с помощью сетевого контактора не является достаточным в этом случае. Электирическое отсоединение от системы питания всегда является достаточным требованием для защиты персонала работающего на оборудовании ( техническое обслуживание,)
Для обеспечения управления внешним сетевым контактором устанавливаемым производителем оборудования (контактор совместим с SINAMICS преобразователем) соответствующая программа управления присутствует в главном блоке управления(CU) который соединен с активным модулем питания книжного формата. Так же рекомендуются разработанные для использования совместно с модулями питания сетевые контакторы. Сетевой реактор всегда необходим. Вместе с Активным модулем питания он абсолютно точно подходит для работы с преобразователем. С модулем питаня Smart он должен быть использован для уменьшения сетевых возмущений и для защиты от сверхтоков.
Сетевой фильтр должен использоваться в системах TN (заземлённых) для снижения возмущения в системе
Замечание:
Надлежащие устройства для обеспечения защиты против разрушительных поражающих токов должны быть пригодны для силовых преобразователей в трехфазном мостовом моединении (В6). Модули Sinamics S120 подходят для прямой работы с AC/DC- чувствительными, селективными разрывателями цепей остаточных токов. Асимметричные задержки на входе и выходе вызываемые главным выключателем и соотвтетсвующие электрические потоки и выбросы тока означают что устройства защиты от токов остаточной проводимости с селективной характеристикой отключения должны быть использованы (например 5SZ6468-0KG00, номинальный ток 63 А, номинальный остаточный ток 300мА).
Высокие токи утечки могут генерироваться когда работают синхронные системы преобразования, особенно в соответствии с мерами по гарантированию EMC (экранированные кабели двигателей). Сетевые фильтра предназначенные для Активных модулей питания в 16 кВт и 36 кВт уменьшают токи утечки до уровня ниже 150 мА.
Как альтернатива, разделительный трансформатор может быть использован в дополнении с другими мерами защиты против разрушающих токов утечки для рассоединения токов нулевой последовательности