
Deprecated: Function eregi() is deprecated in /home/h101150-2/siemens71.ru/docs/new/cat.php on line 184
Устройства SIMOTION всегда обладают базовой функциональностью (ядро), которая программируется согласно IEC 61 131.
Дополнительная функциональность, такая как позиционирование, синхронизация движения, использование кулачков и каналов регулирования температуры, доступна в виде загружаемых технологических пакетов.
Эти технологические пакеты позволяют создавать технологических объектов, которые предлагают Вам очень простое и унифицированное представление функций этих технологических пакетов.
Имеется множество технологических объектов, однако все они создаются, конфигурируются и параметрируются одинаково.
Кроме того, технологические объекты обладают программным интерфейсом, чтобы Вы смогли использовать их функциональность из прикладной программы.
Технологический объект «ось»
На примере технологического объекта «ось» будет дано краткое описание отдельных шагов инжиниринга:
- Создание:
Двойным нажатием на накладку «Новая ось» создаётся новый объект типа «ось». - Конфигурирование:
Помощник (набор диалоговых окон) помогает задавать свойства объектов, такие как:- Имя оси
- Функциональность оси
(например, ось позиционирования или ось синхронного движения) - Способ подключения к приводу
(например, аналоговый привод с SIMOTION C230-2 или SINA-MICS S120 через PROFIBUS DP)
После создания и конфигурирования оси она появляется в дереве проекта вместе с вкладками под её именем, позволяющими параметрировать ось и опционально создавать другие технологические объекты, ассоциированные с ней (например, кулачки, измерительные входы).
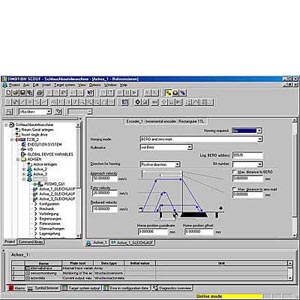
- Параметрирование:
Например, двойным нажатием на вкладку «Реферирование» Вы получаете возможность задать все параметры, относящиеся к реферированию.
Созданный таким образом объект «ось» обладает определённым числом системных переменных, которые отображаются в информационной области окна при выделении оси в дереве проекта.
Системные переменные служат в первую очередь для визуализации состояний осей таких как:
- индикация ошибки регулирования (ошибки следования или рассогласования),
- достижения заданного положения,
- состояние движения
(ось ускоряется, тормозится, находится в покое и т. д.)
Эти системные переменные могут использоваться для:
- Онлайн диагностики
- Отображения на устройствах визуализации
- Записи их значений с использованием функциональности цифрового осциллографа SIMOTION
- При программировании прикладных программ путём опроса / сравнения этих системных переменных.
Прикладные программы получают доступ к функциональности оси по средствам системных функций (команд), которые становятся частью объекта «ось» при его создании.
Команда _pos (axis: = Axis1, position: = 100, velocity: = 123) вызывает перемещение оси 1, регулируемой по положению, в позицию 100 со скоростью 123 (пример системной функций на языке Структурированный текст).