
Deprecated: Function eregi() is deprecated in /home/h101150-2/siemens71.ru/docs/new/cat.php on line 184
В наши дни большинство производственных машин использует цифровое управление. Коммуникация между уровнем управления, уровнем машины и исполнительными органами, датчиками и актуаторами осуществляется по информационной шине. При этом используются два типа коммуникаций: коммуникации процесса и коммуникации данных.
Коммуникация процесса
Коммуникация процесса включает в себя циклическую передачу управляющих данных и сигналов заданий. Количество передаваемых данных сравнительно мало. Например, привод требует только от 4 до16 байт. Количество подключенных сенсоров и исполнительных устройств обычно определяется во время конфигурирования системы, что делает такт шины коммуникации процесса постоянным.
Обмен данными
Обмен данными непосредственно не связан с производствен ным процессом и часто требуется для инжиниринга. При этом данные между соединёнными устройствами передаются случайным образом (ациклически). Объем передаваемых при этом
данных может быть очень большим – больше 100 байт на одно устройство и одну задачу.
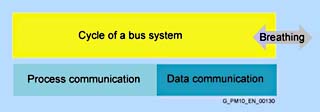
Цикл шины
Цикл шины состоит из передачи данных процесса и ациклического обмена данными. Цикл шинной системы гораздо короче обмена данными. Говорят: цикл шины «дышит» (меняет свою длину). Однако, это «дыхание» не подходит для высокоточных применений в приводной технике.
Типы коммуникаций шинной системы
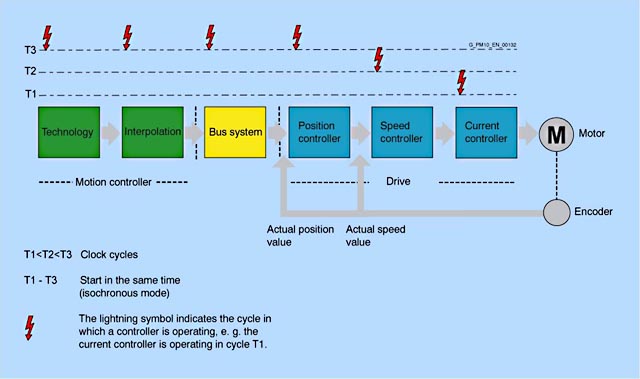
Требования для управления приводов
Большинство современных приводов имеет цифровые системы замкнутого управления. Эти системы управления отвечают за то, что регулируемая переменная привода, скорость или положение, достигаются и поддерживаются. Подобные цифровые системы управления содержат несколько связанных регуляторов (положения, скорости, тока...). Они должны работать согласовано, то есть быть синхронизированы между собой. Синхронизация очень важна для поддержания стабильности управления и получения точности регулирования контролируемой величины или для быстрого достижения этого. Если некоторые компоненты этой системы управления расположены вне привода, должна применяться шинная система, которая будет управлять коммуникациями между этими компонентами. Эта шинная система должна быть синхронизируемой с регуляторами системы управления. Это называют тактовой синхронизацией или изохронным режимом. Для приводов из области систем управления движением эта тактовая синхронизация должна работать максимально быстро и очень точно. Она гарантирует, что длина цикла шины изменяется крайне мало. При этом не говорят о «дыхании» цикла шины (большие изменения), а говорят о «дрожании» (незначительные изменения). Допустимые значения менее 1мкс. Такая синхронизация
достигают с использованием сигнала синхронизации.
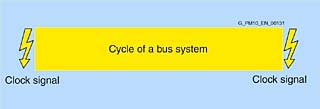
Постоянный цикл (такт) шины
Таким образом, для того чтобы шинная система могла применяться в системах управления движением, она должна позволять
осуществлять коммуникацию процесса и работать в режиме тактовой синхронизации. Для обмена данными часто применяется
дополнительная шинная система. PROFIBUS и PROFINET могут объединить все эти требования в одной шинной системе. Industrial Ethernet, предшественник PROFINET, не удовлетворяет требованиям к коммуникациям в режиме реального времени.
Принцип цифрового управления приводов