
Regulations, standards, and specificationsThe motors comply with the appropriate standards and regulations, see table below. As a result of the fact that in many countries the national regulations have been harmonized with the international IEC 60034-1 recommendation, there are no longer any differences with respect to coolant temperatures, temperature classes, and temperature rise limits.
The motors listed below are UL-approved by Underwriters Laboratories Inc. and also comply with Canadian cUR standards: Degrees of protection for AC motorsA suitable degree of protection must be selected depending on the operating and environmental conditions to protect the machine against:
Degrees of protection of electric motors are specified by a code. This comprises 2 letters, 2 digits and, if required, an additional letter. IP (International Protection) 0 to 6 0 to 8 W, S and M
1) DIN VDE 0530 Part 5 or EN 60034 Part 5 specifies that there are only 5 degrees of protection for the first digit code and 8 degrees of protection for the second digit code in relation to rotating electrical machinery. However, IP6 is included in DIN 40050, which generally applies to electrical equipment. Recommended degrees of protection for AC motors When cooling lubricants are used, protection against water alone is inadequate. The IP rating should only be considered as a guideline in this case. The motors may have to be protected by suitable covers. Attention must be paid to providing suitable sealing of the motor shaft for the selected degree of protection for the motor (for 1FT7: IP67 degree of protection). The table can serve as a decision aid for selecting the proper degree of protection for motors. With mounting position IM V3/IM V19/IM V6/IM V35 with shaft extension facing upwards, a permanent covering of liquid on the flange must be avoided. With a mounting position with the shaft extension facing upwards, liquid remaining on the motor flange can be avoided by selecting a 1FT7 motor with degree of protection IP67 and a recessed flange.
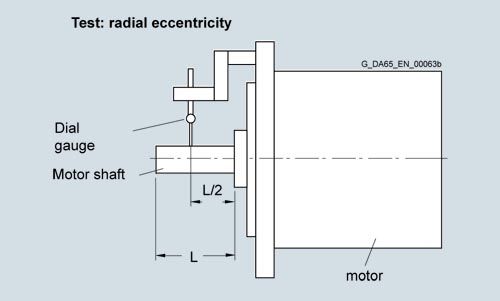
Radial eccentricity tolerance of shaft in relation to housing axisreferred to cylindrical shaft extensions
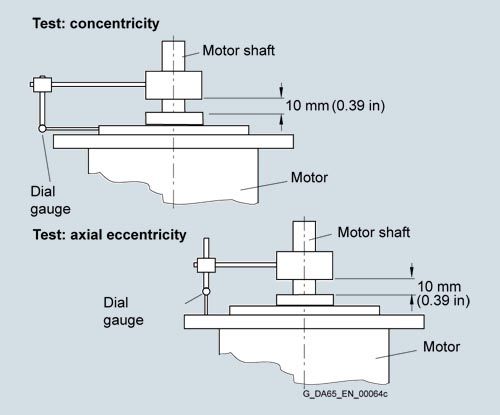
 Concentricity and axial eccentricity tolerance of the flange surface relative to the shaft axis(referred to the centering diameter of the mounting flange)
 Vibration severity and vibration severity grade A in accordance with IEC 60034‑14The vibration severity is the RMS value of the vibration velocity (frequency range from 10 to 1000 Hz). The vibration severity is measured using electrical measuring instruments in compliance with DIN 45666. The values indicated refer only to the motor. These values can increase as a result of the overall system vibrational behavior due to installation. 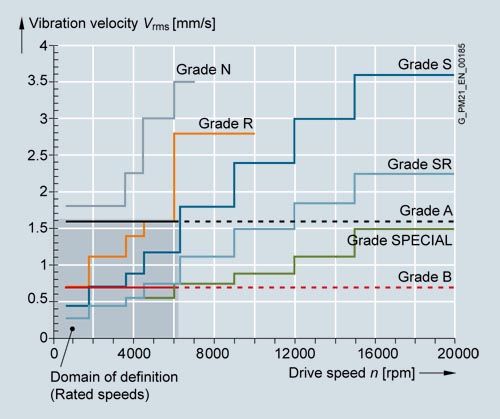 Vibration severity limit values for shaft heights 20 to 132 The speeds of 1800 rpm and 3600 rpm and the associated limit values are defined in accordance with IEC 60034-14. The speeds of 4500 rpm and 6000 rpm and the specified values are defined by the motor manufacturer. The motors maintain vibration severity grade A up to rated speed. 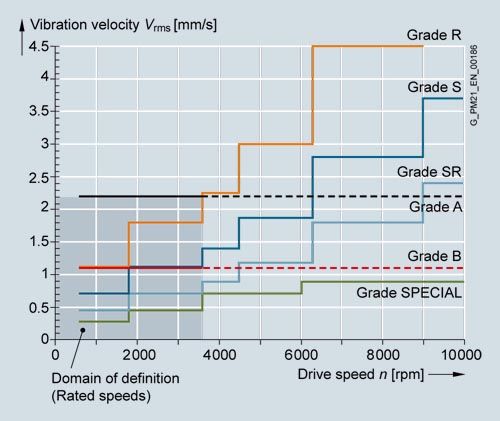 Vibration severity limit values for shaft heights 160 to 280 Balancing according to DIN ISO 8821In addition to the balance quality of the motor, the vibration qualit​​y of motors with mounted belt pulleys and coupling is essentially determined by the balance quality of the mounted component. If the motor and mounted component are separately balanced before they are assembled, then the process used to balance the belt pulley or coupling must be adapted to the motor balancing type. The following different balancing methods are used on motors of types SIMOTICS M‑1PH8:
The letter H (half key) or F (full key) is printed on the shaft extension face to identify a half‑key balanced or a full‑key balanced SIMOTICS M‑1PH8 motor. SIMOTICS S-1FT7/S-1FK7 motors with feather key are always half-key balanced. In general, motors with a plain shaft are recommended for systems with the most stringent vibrational quality requirements. For full‑key balanced motors, we recommend belt pulleys with two opposite keyways, but only one feather key in the shaft extension. Vibration stress, immitted vibration valuesThe following maximum permissible vibration stress limits at full reliability performance apply only to SIMOTICS S-1FT7/1FK7 permanent-magnet servomotors. Vibration stress according to DIN ISO 10816:
For motors with forced ventilation, the limit values for axial and radial acceleration are limited to 10 m/s2 (32.8 ft/s2) For all main motors of type SIMOTICS M-1PH8, the following limits are valid for (immitted) vibration values introduced into the motor from outside:
For all torque motors of type SIMOTICS T-1FW3, the following limits are valid for (immitted) vibration values introduced into the motor from outside:
Coolant temperature (ambient temperature) and installation altitude for motors with natural cooling and forced ventilationOperation (unrestricted): -15 to +40 °C (5 to 104 °F) The rated power (rated torque) is applicable to continuous duty (S1) in accordance with EN 60034-1 at rated frequency, a coolant temperature of 40 °C (104 °F) and an installation altitude of up to 1000 m (3281 ft) above sea level. Apart from the SIMOTICS M-1PH8 motors, all motors are designed for temperature class 155 (F) and utilized in accordance with temperature class 155 (F). The SIMOTICS M-1PH8 motors are designed for temperature class 180 (H). For all other conditions, the factors given in the table below must be applied to determine the permissible output (torque). The coolant temperature and installation altitude are rounded to 5 °C (41 °F) and 500 m (1640 ft) respectively.
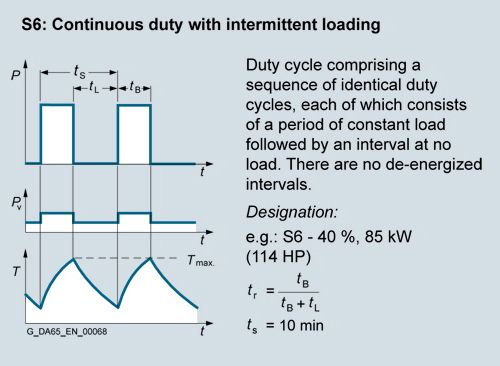
Duty types S1 and S6 in accordance with EN 60034‑1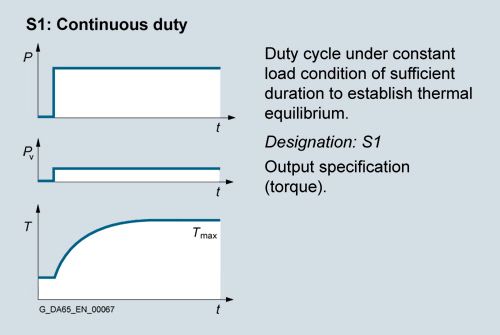
 Rated torqueThe torque supplied on the shaft is indicated in Nm (lbf-ft) in the selection and ordering data. Mrated = 9.55 Г— Prated Г— 1000/nrated Prated Rated power in kW nrated Rated speed in rpm Mrated Rated torque in Nm
Mrated = Prated Г— (5250/nrated) Prated Rated power in hp nrated Rated speed in rpm Mrated Rated torque in lbf-ft DURIGNIT IR 2000 insulationThe DURIGNIT IR 2000 insulation system consists of high-quality enamel wires and insulating sheeting in conjunction with solventfree resin impregnation. The insulating material system ensures that these motors will have a high mechanical and electrical stability, high service value, and a long service life. The insulation system protects the winding to a large degree against aggressive gases, vapors, dust, oil, and increased air humidity. It can withstand the usual vibration stressing. Characteristic curves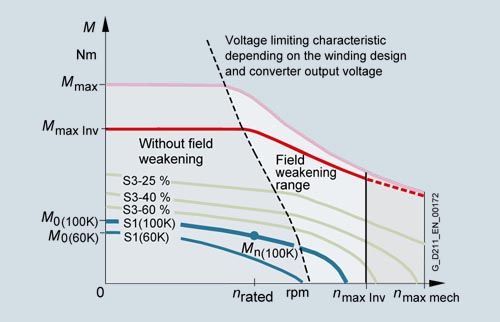 Torque characteristic of a synchronous motor operating on a converter with field weakening (example) nrated Rated speed nmaxInv Maximum permissible electric speed limit nmaxmech Maximum permissible mechanical speed limit M0 Static torque Mrated Rated torque at rated speed Mmax Inv Achievable maximum torque with recommended Motor Module Mmax Maximum permissible torque Motor protection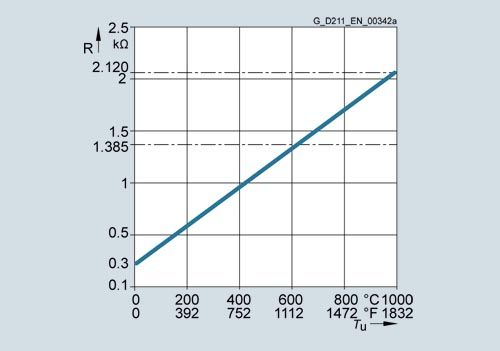 PT1000 temperature sensor characteristics does not focus on temperature range of importance (i.e. 0 to 300 degrees C) The motor temperature for converter motor operation is measured using the Pt1000 temperature sensor (see characteristic) and the KTY84-130 in isolated cases. This temperature sensor is a semi-conductor that changes its resistance depending on temperature in accordance with a defined curve. Siemens converters calculate the motor temperature from the resistance of the temperature sensor. Their parameters can be set for specific alarm and shutdown temperatures. The temperature sensor is embedded in the winding overhang of the motor in the same way as a PTC thermistor. Motors without an integrated DRIVE-CLiQ are now fitted with the new Pt1000 temperature sensor. Exception 1FW6: The conversion will not take place until mid-2017. Motors with an integrated DRIVE-CLiQ interface (1FT7/1FK7/ 1PH8/1FW3) will generally be converted to Pt1000 from the start of 2017. Both sensors are evaluated in the SINAMICS S120 drive system as a standard function. If the motors are operated on converters that do not feature a temperature sensor evaluation function, the temperature can be evaluated with the external 3RS1040 temperature monitoring relay. For further information, please refer to Catalog IC 10 or visit the Siemens Industry Mall. http://www.siemens.com/industrymall Paint finishSIMOTICS S-1FT7/S-1FK7 motors (up to SH 100) without a paint finish have an impregnated resin coating. Motors with primer have corrosion protection. All motors can be painted over with commercially available paints. Up to 2 additional paint coats are permissible.
Built-in encoder systems without DRIVE‑CLiQ interfaceFor motors without an integrated DRIVE-CLiQ interface, the analog encoder signal in the drive system is converted into a digital signal. For these motors as well as external encoders, the encoder signals must be connected to SINAMICS S120 via Sensor Modules. Built-in encoder systems with DRIVE‑CLiQ interfaceFor motors with an integrated DRIVE-CLiQ interface, the analog encoder signal is internally converted to a digital signal. No further conversion of the encoder signal in the drive system is required. The motor-internal encoders are the same encoders that are used for motors without a DRIVE-CLiQ interface. Motors with a DRIVE-CLiQ interface simplify commissioning and diagnostics, for example, as the encoder system is identified automatically. The different encoder types, incremental, absolute, or resolver, are all connected with one type of MOTION-CONNECT DRIVE-CLiQ cable. Short designations for the encoder systemsThe first letters of the short designation define the encoder type. This is followed by the resolution in signals per revolution if S/R is specified (for encoders without DRIVE-CLiQ interface) or in bits if DQ or DQI is specified (for encoders with DRIVE-CLiQ interface).
Overview of the motor encoder systems
1) Not for SIMOTICS T-1FW3. Not every encoder is available for every motor shaft height. – Not possible Multi-turn absolute encoderThis encoder outputs an absolute angular position between 0° and 360° in the specified resolution. An internal measuring gearbox enables it to differentiate 4096 revolutions. So with a ball screw, for example, the absolute position of the slide can be determined over a long distance. 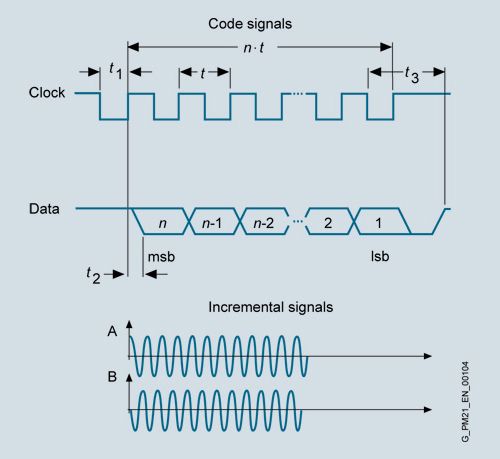 Multi-turn absolute encoder Single-turn absolute encoderThis encoder outputs an absolute angular position between 0° and 360° in the specified resolution. In contrast to the multi-turn absolute encoder, it has no measuring gearbox and can therefore only supply the position value within one revolution. It does not have a traversing range.
1) Not for absolute encoder, single-turn AS
1) The single-turn absolute encoder is used for the previous incremental encoders. Incremental encoderThis encoder senses relative movements and does not supply absolute position information. In combination with evaluation logic, a zero point can be determined using the integrated reference mark, which can be used to calculate the absolute position. Incremental encoder IC/IN (sin/cos)The encoder outputs sine and cosine signals. These can be interpolated using evaluation logic (usually 2048 points) and the direction of rotation can be determined. In the version with DRIVE-CLiQ interface, this evaluation logic is already integrated in the encoder. Commutation position The position of the rotor is required for commutation of a synchronous motor. Encoders with commutation position (also termed C and D tracks) detect the angular position of the rotor. 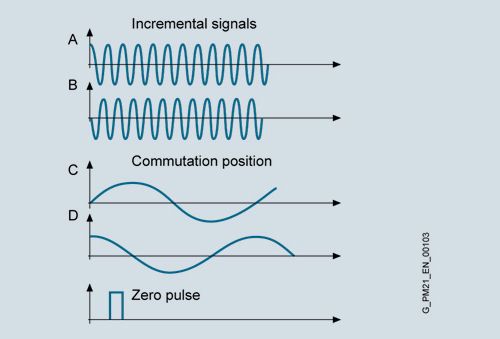 Incremental encoder IC/CN (sin/cos), commutation position only for IC Incremental encoder HTL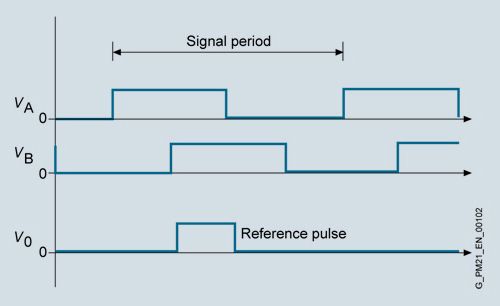 Incremental encoder HTL
1) Instead of the IC22DQ incremental encoder, the AS24DQI single-turn absolute encoder is used for SIMOTICS S-1FK7/1FT7.
ResolverThe number of sine and cosine periods per revolution corresponds to the number of pole pairs of the resolver. In the case of a 2-pole resolver, the evaluation electronics may output an additional zero pulse per encoder revolution. This zero pulse ensures a unique assignment of the position information in relation to an encoder revolution. A 2-pole resolver can therefore be used as a single-turn encoder. 2-pole resolvers can be used for motors with any number of poles. With multi-pole resolvers, the pole pair numbers of the motor and the resolver are always identical, so that the resolution is correspondingly higher than with 2-pole resolvers. 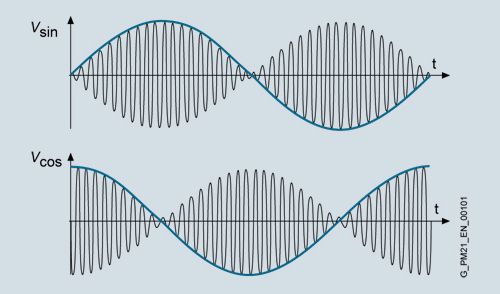
1) Output signals: 2-pole resolver: 1 sin/cos signal per revolution 6-pole resolver: 3 sin/cos signals per revolution 8-pole resolver: 4 sin/cos signals per revolution
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Каталог 2018 | Каталог 2017 | Каталог 2016 | Каталог 2015 | Каталог 2014 | Каталог 2013 | Каталог 2012 | Сертификат | Контакты | Карта сайта | Поиск |
