

Rating plate
According to DIN EN 60034-1, the approximate overall weight is specified on the rating plate for all motors of frame size 90 and above (from approx. 30 kg).
For all motors, an additional rating plate can be supplied loose, order code K31. An extra rating plate for identification codes is also possible, order code Y82. In the standard version, the rating plate is available in English and German.
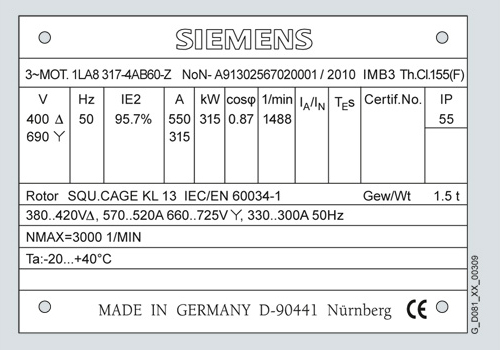
Example of rating plate for 1LA8 mains-fed operation (IE2)
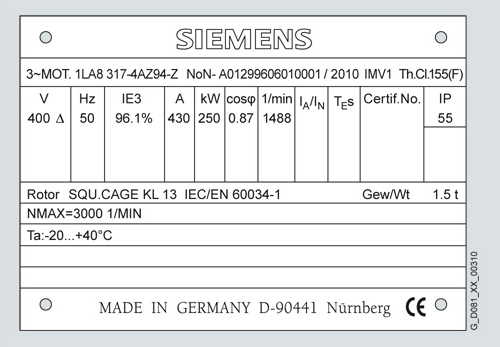
Example of rating plate for 1LA8 mains-fed operation (IE3)
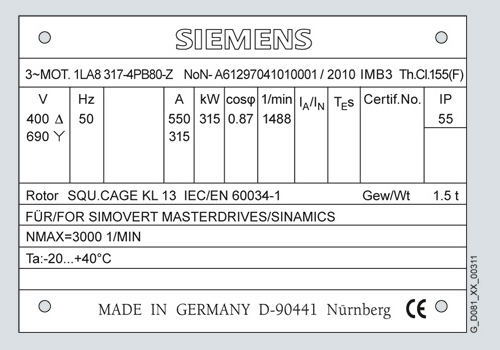
Example of rating plate for 1LA8 converter-fed operation
All motors which comply with the international standard IEC 60034-30:2008 (Rotating electrical machines – Part 30: Efficiency classes of single-speed, three-phase, cage-induction motors (IE code)) display the efficiency class and the efficiency on the rating plate. This efficiency is based, according to the above standard, on the losses determined in accordance with standard part IEC 60034-2-1:2007.
Explosion-proof motors, order codes M35 and M39 for Zone 22 as well as M72 and M73 for Zone 2, display the corresponding identification on an extra rating plate.
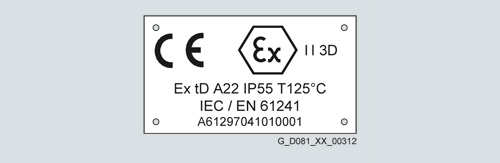
Example for extra rating plate for Zone 22 (mains-fed and converter-fed operation)
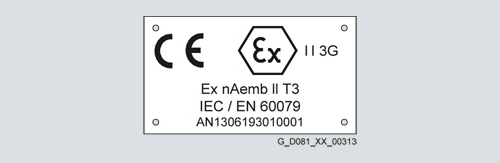
Example for extra rating plate for Zone 2 (mains-fed and converter-fed operation)
Converter-fed operation
The motors are equipped with standard rotors and are suitable for mains-fed or converter-fed operation. All motors can therefore be operated with a converter, in principle. Special measures are necessary in the case of some motors, especially when non-Siemens converters are used.
All data is applicable to a 50 Hz sinusoidal supply.
Rated voltage
The tolerance for the rated voltage is in accordance with DIN EN 60034-1 in all cases, a rated voltage range is not specified.
Motor protection
A motor protection function can be implemented using the I2t sensing circuit implemented in the converter software.
If required, more precise motor protection can be afforded by direct temperature measurement using KTY84 sensors, PT100 resistance thermometers or PTC thermistors in the motor winding. Some converters from Siemens determine the motor temperature using the resistance of the temperature sensor. They can be set to a required temperature for alarm and tripping.
If PT100 resistance thermometers are ordered for cooling temperature monitoring (order code A61) or KTY84 temperature sensors (order code A23), the standard thermistors are omitted. Combination of A12 and A61 or A12 and A23 is possible, additional charge on request.
Evaluation of the KTY or PT100 sensor is performed as described above, for example, in the converter. For motors for mains-fed operation, the 3RS10 temperature monitoring device that forms part of the protective equipment must be ordered separately, for further details, see Catalog IC 10.
Insulation
The standard insulation of the motors is designed such that converter-fed operation is possible without limitation at voltages ≤ 500 V. This also applies for operation with a pulse-controlled AC converter with voltage rise times ts > 0.1 μs at the motor terminals.
All motors with voltage codes 4, 5 and 8 must be operated under these preconditions on a converter.
This does not apply to motors with voltages > 500 up to 690 V, that must have special insulation for operation on a pulse-controlled AC converter (SINAMICS, SIMOVERT MASTERDRIVES) without a converter circuit (du/dt filter or sine-wave filter), i.e. when 10th position of the Order No. = "M").
For converter-fed operation with the outputs specified in the Catalog, the motors are used according to temperature class 155 (F), i.e. in this case neither a service factor > 1 nor an increased coolant temperature is possible (order codes C11, C12 and C13 cannot be ordered).
Connecting motors
When connecting the motors, it is important to consider the restrictions for mains-fed machines as well as the maximum conductor cross-sections permitted for the converter.
Ventilation/noise generation
The fan noise can increase at speeds that are higher than the rated speed of self-ventilated motors (this is not the case for forced-ventilated motors 1PQ8). To increase motor utilization at low speeds it is recommended that forced-ventilated 1PQ8 motors are used.
|
Technical data of the separately driven fans for 1PQ8 motors |
||||
|---|---|---|---|---|
|
Frame size |
P
rated, 50 Hz kW
|
P
rated, 60 Hz kW |
I
rated, 400 V,50 Hz
|
I
rated, 460 V,50 Hz
|
|
315 |
0.75 |
1.23 |
3.4 |
3.3 |
|
355, 400 |
1.3 |
2.2 |
6.4 |
6.2 |
|
450 |
3.0 |
4.2 |
8.2 |
7.7 |
In general, for converter-fed operation, the noise level is higher than that specified in the Catalog (exception: 1PQ8). The increase depends on the converter type and can lie between 5 and 10 dB(A) depending on the frame size and number of poles of the motor.
Mechanical stress and grease lifetime
When motors are operated at speeds above the rated speed, the running smoothness and the bearings are subjected to greater mechanical stress. This reduces the service life of the grease and bearings. More detailed information on request.
Bearings
To prevent damage being caused as a result of bearing currents, insulated bearings are used at the non-drive-end (NDE) of 1LA8, 1LL8 and 1PQ8 motors for converter-fed operation in the standard version (this can be recognized when 9th position of Order No. = "P").
When operating multiphase induction machines on a converter, an electrical bearing stress results from a capacitive induced voltage via the bearing lubricating film, depending on the principle being used. The physical cause of this is the common-mode voltage at the converter output that is inherent in the control method for a converter: The sum of the three phase voltages is – in contrast to straightforward mains-fed operation – not equal to zero at every point in time. The high-frequency, pulse-shaped common-mode voltage brings about a residual current, which closes back to the converter's DC link via the machine's internal capacitances, the machine housing and the grounding circuit. The machine's internal capacitances include the main insulation winding capacitance, the geometric capacitance between the rotor and stator, the lubricating film capacitance and the capacitance of any bearing insulation that may be present. The level of the currents due to the internal capacitances is proportional to the gradients, i.e. the voltage variation of the DC voltage (i(t) = C ⋅ du/dt).
In order to apply currents to the motor which are sinusoidal as far as possible (smooth running, oscillation torques, stray losses), a high clock frequency is required for the converter's output voltage. The related (very steep) switching edges of the converter output voltage (and also, therefore, of the common-mode voltage) cause correspondingly high capacitive currents and voltages on the machine's internal capacitances.
The voltage that is injected capacitively across the bearing can result, in the worst case, in stochastic arcing through the lubrication film of the bearing and prematurely age or damage the bearing. (The current pulses caused by arcing in the lubrication film are known as EDM currents (Electrostatic Discharge Machining) in the technical literature.)
This physical effect, which occurs in isolated cases, has mostly been observed in connection with larger motors.
EMC-compliant installation of the drive system is a basic prerequisite for preventing premature bearing damage as a result of bearing currents.
The most important measures for reducing bearing currents:
- Insulated motor bearings at the non-drive-end NDE (standard for 1LA8, 1LL8 and 1PQ8 for converter-fed operation)
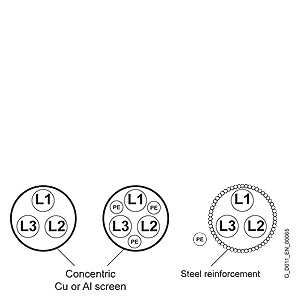
- Use of cables with a symmetrical cable cross-section:
- Preference given to a supply with insulated neutral point (IT system)
- Use of grounding cables with low impedance in a large frequency range (DC up to approximately 70 MHz): for example, plaited copper ribbon cables, HF litz wires
- Separate HF equipotential-bonding cable between motor housing and driven machine
- Separate HF equipotential-bonding cable between motor housing and converter PE busbar
- 360° HF contacting of the cable shield on the motor housing and the converter PE busbar. This can be achieved using EMC screwed glands on the motor end and EMC shield clips on the converter end, for example
- Using motor reactors at the converter
- Common-mode filters at the converter output
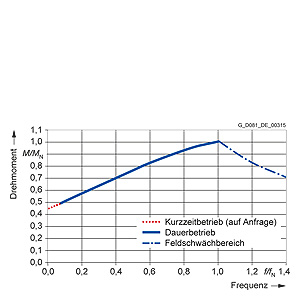
Thermal torque limits
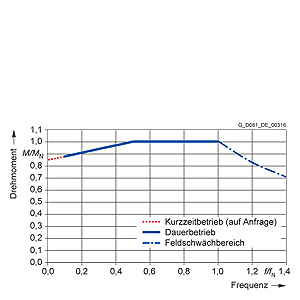
In the case of self-ventilated motors, such as series 1LA8 and 1LL8, the thermally admissible load torques are reduced for continuous operation for speeds below the rated speed. This must be taken into account in those applications in particular that are not subjected to a load torque that is dependent on the square of the speed. Also in the case of forced-air cooled motors of series 1PQ8, the maximum load torques are reduced slightly for high speed ranges.
When motors are operated at speeds above their rated speed (operation in the field-weakening range), the maximum load torque is also reduced.
Operating points with speeds lower than one tenth of the rated speed are only possible following consultation. In an inquiry, the load torque, the duration of the load and, if necessary, the frequency (number per time interval) of the occurring load must be specified.
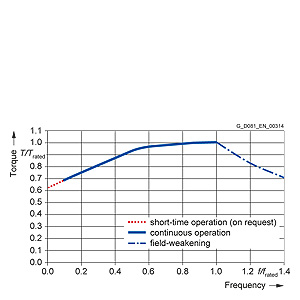
Thermal torque limit characteristic 1LA8
Thermal torque limit characteristic 1PQ8
Thermal torque limit characteristic 1LL8
Technical explanations regarding torque and determination of the start-up time for mains-fed operation
Torque characteristic
The torque generated by a three-phase motor at its shaft varies considerably within the speed range n = 0 to n = ns. The characteristic curve of the torque as a function of the speed of a three-phase motor with squirrel-cage rotor (CL) is shown in the following diagram.
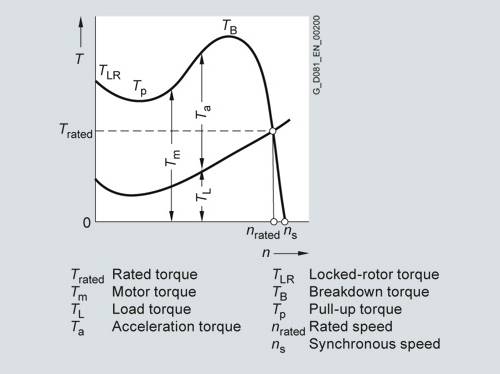
The values for locked-rotor torque and breakdown torque as well as for locked-rotor current for a certain motor can be found in the selection and ordering data.
The limit for the mechanical overload capability is the breakdown torque. According to IEC/EN 60034-1 asynchronous motors must have an overload capability at rated voltage and rated frequency of up to 1.6 times the rated torque for a duration of 15 s.
At rated voltage, the pull-up torque of asynchronous motors must – unless otherwise agreed – at least have the rated torque values specified in the following.
For three-phase motors without pole changing with a rated output equal to or greater than 100 kW the following applies:
- 0.3 times their rated torque and at least 0.5 imes the lockedrotor torque
According to IEC/EN 60034-1, the following tolerances are admissible:
- For locked-rotor torque, from -15 to 25 % of the stated locked-rotor torque
- For locked-rotor current, up to 20 % of the stated locked-rotor current without lower limit
- For breakdown torque, up to -10 % of the stated breakdown torque
- For pull-up torque, -15 % of the guaranteed value.
Taking these tolerances into account, the locked-rotor torque must be sufficiently higher than the breakaway torque of the driven machine; and the motor torque must constantly exceed the load torque during ramp-up until the operating speed is achieved.
In the case of squirrel-cage motors, the locked-rotor torque and breakdown torque are listed in the selection and ordering data as multiples of the rated torque.
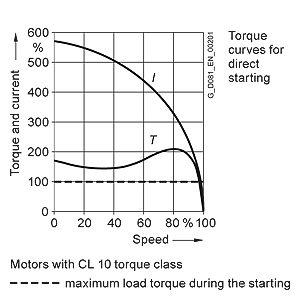
The normal practice is to start squirrel-cage motors directly on line. The torque class indicates that with direct-on-line starting, even if there is 5 % undervoltage, it is possible to start up the motor against a load torque of
- 130 % (for CL 13),
- 100 % (for CL 10),
- 70 % (for CL 7),
- 50 % (for CL 5)
of the rated torque.
The rated torque can be calculated as follows:

T rated Rated torque in Nm
n rated Rated speed in rpm
P rated Rated output in kW
The rated speed of the motor differs from the synchronous speed by the slip Srated.
It is:
S rated Slip in %
n S Synchronous speed in rpm
n rated Rated speed in rpm
Calculation of the start-up time for direct on-line starting
The start-up time from n = 0 to n = nop can be approximately determined from the average acceleration torque.
t st Start-up time in s
J Total moment of inertia in kgm2
n op Operating speed in rpm
T aav Average acceleration torque in Nm
The total moment of inertia is made up of the motor moment of inertia plus the moment of inertia of the driven machine and the coupling or belt pulleys and is converted to the speed of the motor shaft.
Limit values for the start-up curve of three-phase squirrel-cage motors for voltages up to and including 690 V are included in IEC/EN 60034.
If no sound start-up is possible due to a high moment of inertia and/or a high load torque, a larger motor or a three-phase motor with a SINAMICS frequency converter can be selected for SIMOTICS N-compact motors.
A mechanical solution for coping with heavy starting is to use a starting coupling, whose application is limited by its capability to absorb heat.
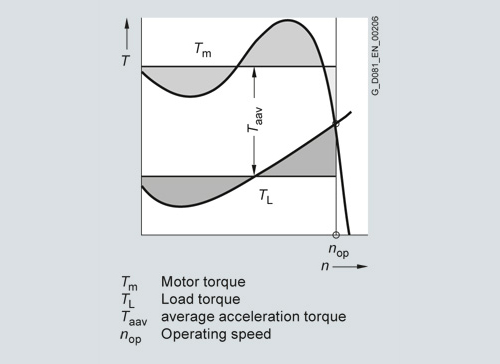
Determination of the average acceleration torque
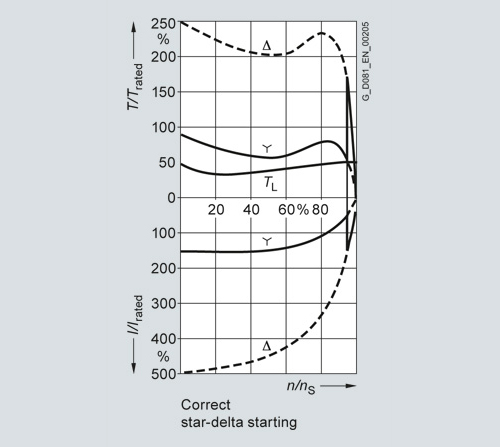
Start-up procedure for three-phase motors with squirrel-cage rotor
Three-phase motors with squirrel-cage rotors should, as far as possible, be started directly on-line.
- It must be observed that the torque and current curve for a specific motor is predetermined, regardless of the heaviness of start-up.
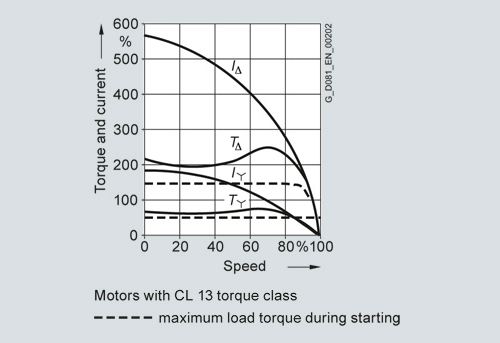
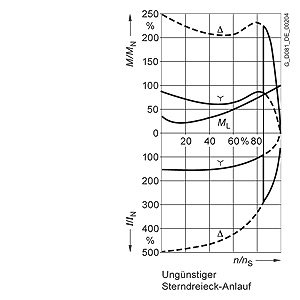
Star/delta start-up of motors with squirrel-cage rotor must be used if small locked-rotor currents (e.g. in the supply conditions of the electric power company) or a particularly low startup torque (soft starting) are required. Locked-rotor torque, breakdown torque and all other torque values as well as the locked-rotor current are 25 to 30 % of the values at direct online starting. - The motor torque must be sufficiently higher than the load torque during start-up in the star stage. The change from star to delta must not occur before approximately the operating speed.
The first diagram shows a case in which star-delta start-up is not appropriate, because the excessive load torque causes the premature change which in turn causes a high torque and current surge that renders the star-delta starting ineffective.
The torque curve can be approximately reduced by the square of the voltage and the current curve linearly with the voltage by reducing the voltage at the motor terminals with the help of a starting transformer or starting resistors.
A starting with rated current is possible on the converter – second diagram.
Soft starting for motors with squirrel-cage rotor can also be achieved with short-circuit soft starting (a resistor can be connected in one phase during start-up). The locked-rotor torque can be arbitrarily reduced with the help of this circuit. The locked-rotor current without a resistor or reactor is slightly higher in both phases than with direct on-line starting.
This start-up procedure can be achieved more satisfactorily using the electronic motor starter "SIKOSTART" which limits the torque and the current during starting.
Any inquiries regarding start-up procedures must include the following information:
1) Required output and rated speed of the driven machine
2) Planned motor speed
3) Load torque of the driven machine, depending on the speed of the driven machine or the motor speed
4) Total external moment of inertia and rated speed of the driven machine or referred to the motor speed
5) Number of starts in a specific time period and duty cycle or
6) Characteristics and number of operating cycles in a certain time (method of braking)
Start-up times and moments of inertia for 1LA8 motors for mains-fed operation (default values)
The values in the following table are only valid for 1LA8 motors for mains-fed operation and are applicable for continuous heating of 90 % of the rated output at 50 Hz (0.9 x Prated). At 60 Hz, the admissible moments of inertia must be reduced again by about 20 %. The moment of inertia Jadm in the tables is the moment of inertia which the driven machine is allowed to have as a maximum in order to start the motor. For this reason, the moment of inertia of the motor is already taken into account in the selection and ordering data.
|
Frame size |
Type |
Locking of brake |
Admissible moment of inertia and start-up times when starting up the motor |
||||
|---|---|---|---|---|---|---|---|
|
|
cold |
warm |
1x cold |
|
1x warm |
|
|
|
Self-ventilated motors for mains-fed operation, cast-iron series 1LA8 – 2-pole: 3000 rpm at 50 Hz |
|||||||
|
315 |
1LA8315-2AC.. |
18 |
10 |
125 |
33.9 |
48 |
13.0 |
|
315 |
1LA8317-2AC.. |
17.5 |
10 |
140 |
33.2 |
58 |
13.4 |
|
355 |
1LA8353-2AC.. |
18 |
9 |
175 |
41.4 |
33 |
7.8 |
|
355 |
1LA8355-2AC.. |
20 |
10 |
190 |
45.8 |
40 |
9.7 |
|
355 |
1LA8357-2AC.. |
15 |
7.5 |
180 |
30.0 |
40 |
6.7 |
|
400 |
1LA8403-2AC.. |
22 |
13 |
245 |
40.2 |
95 |
15.7 |
|
400 |
1LA8405-2AC.. |
19 |
11 |
255 |
37.2 |
90 |
13.1 |
|
400 |
1LA8407-2AC.. |
17 |
9.5 |
300 |
34.9 |
85 |
9.9 |
|
450 |
1LA8453-2AE.. |
21.5 |
15 |
178 |
31.3 |
83 |
14.6 |
|
450 |
1LA8455-2AE.. |
20.5 |
14 |
190 |
30.2 |
90 |
14.3 |
|
450 |
1LA8457-2AE.. |
19 |
13 |
200 |
28.2 |
95 |
13.4 |
|
Self-ventilated motors for mains-fed operation, cast-iron series 1LA8 – 4-pole: 1500 rpm at 50 Hz |
|||||||
|
315 |
1LA8315-4AB.. |
22 |
13 |
590 |
36.9 |
350 |
21.9 |
|
315 |
1LA8317-4AB.. |
19 |
11 |
730 |
32.3 |
425 |
18.8 |
|
355 |
1LA8353-4AB.. |
20 |
11 |
1000 |
45.7 |
270 |
12.4 |
|
355 |
1LA8355-4AB.. |
18 |
10 |
1020 |
39.6 |
280 |
10.9 |
|
355 |
1LA8357-4AB.. |
19 |
10.5 |
1370 |
41.9 |
370 |
11.3 |
|
400 |
1LA8403-4AB.. |
20.5 |
11.5 |
1420 |
46.2 |
430 |
14.0 |
|
400 |
1LA8405-4AB.. |
20 |
11 |
1600 |
44.5 |
480 |
13.3 |
|
400 |
1LA8407-4AB.. |
19 |
10.5 |
1750 |
43.6 |
525 |
13.1 |
|
450 |
1LA8453-4CE.. |
17.5 |
10 |
950 |
23.7 |
300 |
7.5 |
|
450 |
1LA8455-4AC.. |
18.5 |
10.5 |
1200 |
26.8 |
370 |
8.3 |
|
450 |
1LA8457-4AC.. |
17 |
9 |
1160 |
22.3 |
380 |
7.3 |
|
Self-ventilated motors for mains-fed operation, cast-iron series 1LA8 – 6-pole: 1000 rpm at 50 Hz |
|||||||
|
315 |
1LA8315-6AB.. |
33 |
18 |
1900 |
57.4 |
830 |
25.1 |
|
315 |
1LA8317-6AB.. |
31 |
15.5 |
2300 |
55.6 |
1000 |
24.2 |
|
355 |
1LA8355-6AB.. |
40 |
22 |
2950 |
62.2 |
1350 |
28.5 |
|
355 |
1LA8356-6AB.. |
37 |
18 |
3150 |
60 |
1450 |
27.9 |
|
355 |
1LA8357-6AB.. |
40 |
22 |
3950 |
62.5 |
1800 |
28.5 |
|
400 |
1LA8403-6AB.. |
34 |
18.4 |
3450 |
51.1 |
850 |
12.6 |
|
400 |
1LA8405-6AB.. |
32 |
17.5 |
3500 |
43.3 |
900 |
11.1 |
|
400 |
1LA8407-6AB.. |
24 |
12 |
2200 |
25.6 |
740 |
8.6 |
|
450 |
1LA8453-6AB.. |
16 |
7 |
1400 |
15.5 |
560 |
6.2 |
|
450 |
1LA8455-6AB.. |
19 |
8.5 |
1700 |
18.1 |
670 |
7.1 |
|
450 |
1LA8457-6AB.. |
16 |
7 |
1800 |
15.9 |
720 |
6.4 |
|
Self-ventilated motors for mains-fed operation, cast-iron series 1LA8 – 8-pole: 750 rpm at 50 Hz |
|||||||
|
315 |
1LA8315-8AB.. |
40 |
22 |
4800 |
109.5 |
1950 |
44.5 |
|
315 |
1LA8317-8AB.. |
42 |
23 |
6800 |
125.9 |
2500 |
46.3 |
|
355 |
1LA8355-8AB.. |
41 |
22.5 |
6200 |
89.6 |
3100 |
44.8 |
|
355 |
1LA8357-8AB.. |
40 |
22 |
7600 |
88.7 |
3800 |
44.3 |
|
400 |
1LA8403-8AB.. |
55 |
30 |
9700 |
107.5 |
4400 |
48.8 |
|
400 |
1LA8405-8AB.. |
54 |
29.5 |
11000 |
102.9 |
5400 |
50.5 |
|
400 |
1LA8407-8AB.. |
52 |
28.5 |
11200 |
95.4 |
5400 |
46.0 |
|
450 |
1LA8453-8AB.. |
44 |
25 |
9800 |
78.8 |
2900 |
23.3 |
|
450 |
1LA8455-8AB.. |
42 |
23 |
10500 |
71.4 |
3000 |
20.4 |
|
450 |
1LA8457-8AB.. |
44 |
25 |
12400 |
78.1 |
3700 |
23.3 |
|
Self-ventilated motors for mains-fed operation, cast-iron series 1LA8, IE3 version – 2-pole: 3000 rpm at 50 Hz |
|||||||
|
315 |
1LA8315-2EC.. |
18 |
10 |
125 |
33.9 |
48 |
13.0 |
|
315 |
1LA8317-2EC.. |
17.5 |
10 |
140 |
33.2 |
58 |
13.4 |
|
355 |
1LA8353-2EC.. |
18 |
9 |
175 |
41.4 |
33 |
7.8 |
|
Self-ventilated motors for mains-fed operation, cast-iron series 1LA8, IE3 version – 4-pole: 1500 rpm at 50 Hz |
|||||||
|
315 |
1LA8316-4EB.. |
28 |
13 |
590 |
36.7 |
350 |
21.9 |
|
315 |
1LA8318-4EB.. |
31 |
9 |
730 |
38.4 |
330 |
17.5 |
|
355 |
1LA8353-4EB.. |
23 |
9 |
1000 |
49.6 |
270 |
13.6 |
|
Self-ventilated motors for mains-fed operation, cast-iron series 1LA8, IE3 version – 6-pole: 1000 rpm at 50 Hz |
|||||||
|
315 |
1LA8317-6EB.. |
49 |
17 |
1900 |
72.1 |
830 |
31.6 |
|
315 |
1LA8318-6EB.. |
42 |
16 |
2300 |
71 |
1000 |
31 |
|
355 |
1LA8355-6EB.. |
40 |
22 |
2950 |
62.2 |
1350 |
28.5 |
|
355 |
1LA8356-6EB.. |
37 |
18 |
3150 |
60 |
1450 |
27.9 |