Deprecated: Function eregi() is deprecated in /home/h101150-2/siemens71.ru/docs/new/cat.php on line 184
Обзор ключевых функций контроля по обратной/прямой связи модуля:
|
Типы контроля с закрытым циклом S120 |
Типы контроля с открытым циклом S120 |
Основные функции S120 для блокового формата/формата шасси |
Комментарии, примечания |
|
|---|---|---|---|---|
|
Контроль питания |
|
|
|
Сетевой датчик — это модуль распознавания напряжения VSM 10; "активным" является сетевой ток; 3-фазный с линейной частотой |
|
Servo control |
|
|
|
The position control can be selected as a function module |
Функциональные модули
Базовый позиционер" используется для абсолютного/относительного позиционирования линейных и вращающихся осей (коэффициент) с шифроваторами двигателя (система косвенных показателей) или машинные шифраторы (система прямых показателей). "Технологический контроллер" разработан как PID-контроллер. Он подходит для реализации элементов управления для контролирующих переменных. таких как уровень заполнения, температура, напряжение, давление, величина расхода и положение.
Интегрированные функции защиты
Блоки управления поддерживают функции безопасности, такие как "Безопасное отключение“ (STO = Защитный механизм отключения привода).
Карта CompactFlash
Функции приводов SINAMICS S120 хранятся на карте CompactFlash. На этой карте хранятся микропрограмма и настройки параметров для всех приводов в форме проекта. На карте CompactFlash также могут храниться дополнительные проекты, что означает, что доступ к текущему проекту может быть получен немедленно при вводе в эксплуатацию определенного количества устройств различных типов. При загрузке блока управления данные на карте CompactFlash считываются и загружаются в ОЗУ.
Микропрограмма разделена на объекты. Объекты привода используются для реализации функций контроля по обратной/прямой связи для линейных модулей, модулей двигателя, модулей питания и других компонентов системы, подключенных к DRIVE-CLiQ.
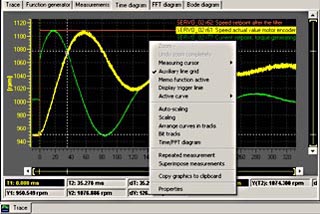
Диагностика оптимально поддерживается функцией отслеживания
Временные характеристики входных и выходных переменных, связанных с объектами приводов, могут быть измерены с помощью интегрированной функции отслеживания, и отображены с помощью средства STARTER. Отслеживать можно до 4 сигналов одновременно. Запись может быть инициирована в качестве функции свободно выбираемых граничных условий, например, значение входной или выходной переменной.