

Deprecated: Function eregi() is deprecated in /home/h101150-2/siemens71.ru/docs/new/cat.php on line 184
Большинство производственных устройств используют цифровые системы шин связи. Они отвечают за связь уровня контроля, контроля устройства и рабочих компонентов, т.е. датчиков и преобразователей. Существует два типа связи: связь процессов и передача данных.
Связь процессов
Связь процессов включает в себя цикличную передачу данных контроля и датчиков. Объем передаваемых данных относительно невелик. Например, привод может осуществлять передачу объема между 4 и 32 байтами. Количество подключенных датчиков и преобразователей обычно указывается в конфигурации, что обеспечивает постоянность цикла передачи с использованием шины.
Передача данных
Передача данных часто необходима для технических процессов и не связана напрямую с реализацией производственного процесса. Данные периодически (ациклично) передаются между подключенными устройствами. Объем этих передаваемых данных может быть очень большим и превышать 100 байтов для каждого устройства и задачи связи.
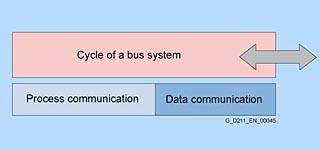
Цикл шины
В цикл шины входят связь процессов и передача данных. Цикл системы шин намного более короток, если не используется передача данных. Существует выражение: цикл шины "изменяется". Однако, эти изменения неприменимы к высокоточным приложениям в технологиях приводов.
Типы связи системы шин
Требования к регулированию привода
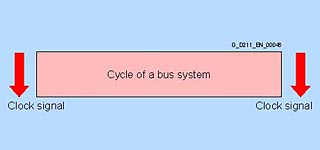
Большинство современных приводов поддерживают цифровой контроль по обратной связи. Этот контроль по обратной связи гарантирует, что необходимые управляемые переменные привода, например, скорость или местоположение, достигаются и поддерживаются. Этот тип цифрового контроля по обратной связи состоит из нескольких взаимосвязанных элементов управления (местоположение, скорость, ток и т.д.). Они должны быть соотнесены с друг другом, т.е. синхронизированы. Эта синхронизация имеет большое значение для стабильной работы элементов управления и достижения и/или поддержания управляемых переменных значений. Если определенные компоненты контроля по обратной связи находятся вне привода, необходимо использовать систему шин для управления связью между этими компонентами. Эта система шин должна быть так же синхронизирована, как и контроль по обратной связи. Такой режим работы называется астатическим. Для приводов в области систем контроля движений астатический режим работы должен быть особенно быстрым и точным. Это гарантирует наличие только небольших отклонений в цикле шины. При этом такой режим работы называется не модуляцией цикла шины (большие отклонения), а флуктуацией (небольшие отклонения). Приемлемыми являются значения <1 µs. Это синхронизация реализуется с помощью тактовых сигналов.
Постоянный цикл шины
Чтобы систему шин можно было использовать для приложений контроля, она должна поддерживать режим связи и астатический режим. Для передачи данных часто используется дополнительная система шин. PROFIBUS и PROFINET могут удовлетворять всем этим требованиям в единой системе шин. Industrial Ethernet, предшественник PROFINET, не удовлетворяет требованиям, касающихся связи в режиме реального времени.
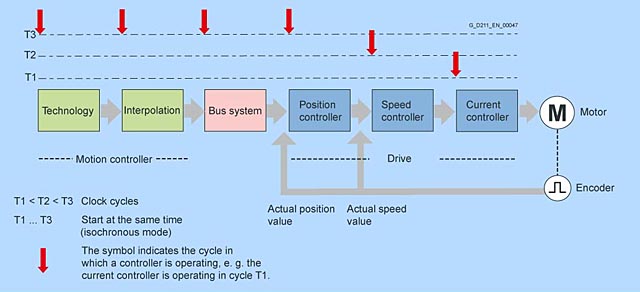
Принцип управления цифровыми приводами