

Выбор двигателя
Двигатель выбирается на базе требуемого крутящего момента, который определяется применением, например, привод движения, подъемный привод, привод подачи или привод главного шпинделя. Также должны быть продуманы редукторы для преобразования движения или согласования скорости и крутящего момента двигателя с режимом нагрузки.
Кроме нагружающего момента, который определяется использованиями, предусматриваются следующие механические характеристики двигателя, среди этих необходимо рассчитать и крутящий момент:
• Подвижные массы
• Диаметр приводного колеса
• Шаг ходового винта, передаточные числа
• Данные фрикционной стойкости
• Механический КПД
• Траектории перемещения
• Максимальная скорость
• Максимальное ускорение и макс. торможение
• Время цикла
Вы должны решить, какие двигатели, синхронные или асинхронные, будут использоваться.
Синхронные двигатели должны выбираться для компактного размера конструкции, низкого момента инерции ротора и следовательно, максимальной динамической характеристики.
Для этого наиболее подходящими двигателями являются 1FT и 1FK, которые могут работать в режиме серво-управления.
Асинхронные двигатели (индукционные двигатели) могут использоваться для увеличения максимальных скоростей в диапазоне ослабления поля В распоряжении также имеются асинхронные двигатели (индукционные двигатели) для более высоких мощностей.
Для этого наиболее подходящими двигателями являются 1PL, 1PH, 1LA и 1LG, которые могут работать в режиме серво-управления.
Во время конфигурации исключительно важны следующие факторы:
- Тип питание от сети, если используются специальные типы двигателей и/или сетевые фильтры в IT-системах (негруппированные системы)
- • Температура окружающей среды и высота инсталляции двигателей и компонентов привода
При выборе двигателя решающую роль играют ограничения параметров двигателя.
Такие параметры определяют крутящий момент и значения питания по скорости с учетом ограничений параметров двигателя по напряжению DC Силового модуля или Двигательного модуля. Напряжение соединения DC в свою очередь зависит от линейного напряжения и, если речь идет о приводах с несколькими двигателями, от типа Линейного модуля.
Ограничения для асинхронных двигателей (индукционных двигателей) (пример)
Ограничения для синхронных двигателей (примеры)
Рабочие циклы
Двигатель определяется по типу рабочего цикла в зависимости от применения. Для различных циклов нагрузки должны использоваться различные характеристики. Необходимо определить следующие рабочие сценарии:
- Рабочие циклы с постоянным периодом состояния "включено"
- Рабочие циклы с переменным периодом состояния "включено"
- Свободный рабочий цикл
Цель – идентифицировать характеристику рабочих точек момента вращения и скорости, на основе которых двигатель может быть определен как подходящий для каждого цикла нагрузки.
Когда рабочий сценарий определен и специфицирован, рассчитывается максимальный двигательный момент. Вообще говоря, это происходит во время фазы ускорения. Крутящий момент нагрузки и момент вращения, необходимые для ускорения двигателя, складываются вместе.
Затем максимальный двигательный момент подтверждается предельными кривыми двигателя.
Следующие критерии применяются к асинхронным двигателям (индукционным двигателям) 1PL и 1PH
Максимальный крутящий момент двигателя = 2 х номинальный крутящий момент
При определении двигателя в расчет должны приниматься следующие критерии:
- Должны соблюдаться динамические границы, т.е. все точки скорости-момента цикла нагрузки должны лежать ниже релевантной предельной кривой.
- Должны соблюдаться температурные границы, т.е. для синхронных двигателей среднеквадратический двигательный момент при средней скорости двигателя, получающейся из рабочего цикла, должен лежать ниже кривой S1 (непрерывный режим). Для асинхронных двигателей (индукционных двигателей) среднеквадратический объем тока двигателя в течение рабочего цикла должен быть меньше, чем номинальный ток двигателя.
- Следует заметить, что макс. допустимый двигательный момент на синхронных двигателях при больших скоростях уменьшается в результате предельной кривой напряжения. Кроме того, должно соблюдаться изоляционное расстояние в 10% от предельной кривой напряжения, чтобы предохранить от флуктуаций напряжения.
- Если используются асинхронные двигатели, то допустимый двигательный момент в диапазоне поля ослабления сокращается по предельной кривой напряжения (предел устойчивости). Должно соблюдаться изоляционное расстояние в 30%.
- Если используются абсолютный датчик, то номинальный момент вращения двигателя сокращается на 10% из-за температурных границ датчика.
Рабочие циклы с постоянным периодом состояния "включено"
Рабочие циклы с постоянным периодом состояния "включено" ставят специальные требования к рабочим характеристикам, как, например, функция скорости, например, M = константа, M ~ n2, M ~ n или P = константа.
Эти приводы обычно работают на стационарной рабочей точке. Применяется задание размеров базовой нагрузки. Крутящий момент базовой нагрузки должен лежать ниже кривой S1.
В случае кратковременных перегрузок (например, во время запуска) применяется задание размеров перегрузки. Пиковый крутящий момент должен лежать ниже предельной кривой напряжения для синхронных двигателей или ниже предела устойчивости для асинхронных двигателей (индукционных двигателей).
В итоге задание размеров выглядит следующим образом:
Выбор двигателей для рабочих циклов с постоянным периодом состояния "включено" (пример)
Рабочие циклы с переменным периодом состояния "включено"
Так же как непрерывный режим (S1), стандартизованные типы периодических режимов (S3) определены для рабочих циклов с переменным периодом состояния "включено". Режим S3 – это операция, которая содержит в себе последовательность похожих циклов, каждый из которых содержит время с постоянной нагрузкой и прерывание
Режим S1 (непрерывное действие)
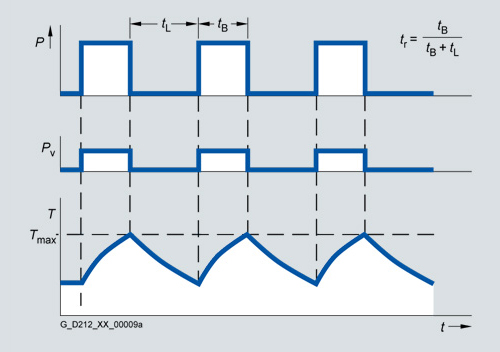
Режим S3 (периодический режим без воздействия на процедуру запуска)
Заданные переменные обычно используются для относительного периода состояния "включено":
- S3 – 60%
- S3 – 40%
- S3 – 25%
Для этих спецификаций подготавливаются соответствующие характеристики двигателя. Нагружающий момент должен лежать ниже соответствующей температурной предельной кривой двигателя. Для рабочих циклов с переменными периодами состояния "включено" принимается в расчет задание размеров перегрузки.
Свободный рабочий цикл
Свободный рабочий цикл определяет ход скорости двигателя и момента вращения по прошествии времени
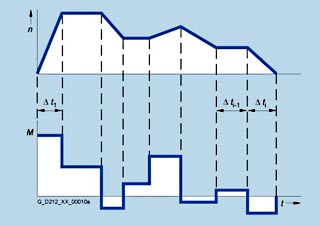
Нагружающий момент устанавливается для каждого промежутка времени. Вдобавок к нагружающему моменту, средний момент инерции нагрузки и момент инерции двигателя должны приниматься во внимание для ускорения. Иногда необходим момент вращения трения, который работает в противоположном направлении движения.
Передаточное число и эффективность зубчатой передачи должны приниматься во внимание, когда вычисление вращающего момента нагрузки и/или ускорения обусловлено двигателем. Повышенное передаточное число увеличивает точность позиционирования на основе разрешения датчика. При данном разрешении датчика двигателя, по мере того как передаточное число растет, следует раскрыть разрешение позиции станка.
Более подробная информация о значимости редукторов приводится в описании двигателей.
Среднеквадратический вращающий момент Meff должен лежать ниже кривой S1.
Пиковый крутящий момент Mmax достигается во время процесса ускорения и должен лежать ниже предельной кривой напряжения для синхронных двигателей или ниже предела устойчивости для асинхронных двигателей (индукционных двигателей).
Выбор двигателя
Выбор двигателя осуществляется на основании характеристик двигателя и требований к его применению.
Следующий шаг, который необходимо выполнить, это проверить, поддерживаются ли температурные границы. Для этого нужно рассчитать ток двигателя при базовой нагрузке. Для конфигурации, основанной на рабочем цикле с постоянным периодом состояния "включено", нужно рассчитать ток перегрузки, исходя из требуемого вращающего момент перегрузки. Правила расчета для этой цели зависят от типа используемого двигателя (синхронный, асинхронный двигатель) и рабочего сценария (рабочие циклы с постоянным/переменным периодом состояния "включено", свободный рабочий цикл).
В заключение должны определяться другие характеристики двигателя. Это делается путем конфигурации опций двигателя (см. Описание двигателя).
Приводы с квадратичной нагрузочной характеристикой
Привода с квадратичной зависимостью момента (M~n2), например, для насосов и вентиляторов, требуют полного момента при номинальной скорости. При старте обычно не возникает повышенного момента или нагрузок. Поэтому обеспечение повышенной перегрузочной способности Двигательного модуля также не является необходимым.
Для приводов с квадратичной зависимостью момента принимаются следующие допущения при выборе подходящего Двигательного модуля: Номинальный ток Двигательного модуля должен быть не менее тока двигателя при полном моменте в требуемой рабочей точке
Как правило, рекомендуется использовать хорошо известные стандартные двигатели 1LA и1LG, которые могут получить полную нагрузку при номинальном питании даже в режиме преобразования. Такие двигатели можно использовать по классу нагревостойкости F. Если необходимо использовать двигатели исключительно по классу нагревостойкости B, то нагрузку следует снизить на 10 %.
Программа SIZER позволяет производить выбор подходящего двигателя и блока питания.
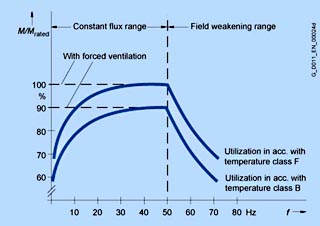
Типичная кривая максимального момента для самовентилирующихся двигателей (например 1LA) с номинальной частотой 50 Гц
Приводы с постоянным моментом нагрузки
Двигатели с автономным охлаждением 1LG и 1LA не могут обеспечить свой полный момент во всём диапазоне скоростей при длительной работе. Длительный допустимый момент уменьшается пропорционально уменьшению скорости по причине ухудшения охлаждения двигателя (см. рисунок).
В зависимости от скоростного диапазона крутящий момент и производительность могут уменьшиться для двигателей с автономным охлаждением.
В случае двигателей с принудительным охлаждением 1PL, 1PH и 1PQ нет необходимости понижать мощность, или понижать незначительно, в зависимости от скоростного диапазона.
Для частот выше номинальной frated двигатели работают в диапазоне ослабления поля . Доступный момент понижается пропорционально примерно. frated/f,, и мощность остаётся без изменения. Примерный запас в 30% должен быть принят для случая остановки особенно для режимов с V/f характеристикой, Этот интервал ослабляется пропорционально (frated/f)2.
Номинальный ток нагрузки Силового модуля или Двигательного модуля должен быть не менее тока двигателя при полном моменте в требуемой рабочей точке.
Программа SIZER позволяет производить выбор подходящего двигателя и блока питания.
Типы двигателей
Как правило, рекомендуется использовать хорошо известные стандартные двигатели 1LA и 1LG, если к механике оборудования не предъявляются особые требования. По отношению к воздействию напряжения стандартная изоляция двигателей выполнена таким образом, что возможна работа м преобразователя при напряжениях V 500 В без каких-либо ограничений (что соответствует напряжению соединения DC Vd 720 В).
Двигатели 1LA8, 1PQ8, 1LG6, 1PH7 и 1PL6 с высотой вала 280 могут быть оснащены улучшенной изоляцией обмотки для операций с преобразователем и напряжением питания до уровня линейного напряжения 690 В (что соответствует напряжению соединения DC Vd 1035 В) без необходимости использования фильтра.
При использовании усиленной изоляции имеется меньше свободного пространства для одного и того же количества оборотов обмотки по сравнению с нормальной изоляции; это означает, что номинальная мощность таких двигателей немного ниже.
Если к крутящему моменту предъявляются более высокие требования, двигатели с автономным охлаждением 1LA4 или двигатели с принудительной вентиляцией 1PQ4 (степень защиты IP55) серии H-compact II применяются для повышения мощности.
Двигатели 1PH7 и 1PL6 рекомендуются для применения при необходимости обеспечения широкого скоростного диапазона и высокой скорости, при этом свободное пространство для установки устройств ограничено. Двигатели 1PH7/1PL6 с одинаковой номинальной мощностью в среднем на 1-2 единицы высоты вала ниже, чем стандартные асинхронные двигатели (индукционные двигатели).
Более подробная информация о двигателях 1LA, 1LG и 1PQ8 изложена в Каталоге D 81.1
Все функциональные возможности приводной системы SINAMICS S120 реализуются в случае комбинирования с синхронными двигателями 1FT6 and 1FK7, двигателями с большим крутящим моментом 1FW3 и асинхронными двигателями (индукционными двигателями) 1PH7, 1PL6 и 1PH4. Блок управления анализируют электронную пластину с номинальными данными и датчики, встроенные в двигатель, через интерфейс DRIVE CLiQ. Это означает, что данные двигателя и датчика не должны параметризироваться при вводе в эксплуатацию или обслуживании. Следующие виды двигателей оснащены интерфейсом DRIVE-CLiQ:
• Синхронные двигатели 1FT6, 1FK7
• двигатели с большим крутящим моментом 1FW3
• Асинхронные двигатели (индукционные двигатели) 1PH7, 1PL6, 1PH4
На интерфейс DRIVE-CLiQ подается питание 24 В DC через датчик кабеля.
Более подробная информация содержится в разделе, посвященном трехфазным двигателям.
Защита двигателя
Блоки управления, которые контролируют Силовые и Двигательные модули, оснащены контуром выявления неисправностей I2 t, для создания термальной модели для расчета температуры двигателя. Эти блоки выполняют простые функции термальной защиты двигателя без использования внешних компонентов.
Если желательно иметь прецизионную защиту двигателя, то этого можно достичь за счет прямого измерения температуры путем установки в обмотку двигателя датчиков KTY84 или терморезисторов PTC.
Для датчиков KTY84 при заказе двигателей серии 1LA8 и 1LG4/1LG6 указывается опция A23. В двигатели серии 1FK, 1FT, 1FW3, 1PH и 1PL они встраиваются серийно.
Если необходимы терморезисторы PTC, при заказе двигателей 1LG4/1LG6 следует указать опцию A11 или A12. В двигатели серии 1LA8/1PQ8 они встраиваются серийно.
Подшипниковые токи
Чтобы на двигатель подавались токи максимально синусоидальной формы (влияет на плавность хода, маятниковые колебания, дополнительные потери) необходимо иметь высокую тактовую частоту выходного напряжения. Возникающие при этом крутые импульсы напряжения вызывают в имеющихся емкостных сопротивлениях (подводка двигателя и обмотки двигателя) появление емкостных токов перезарядки. Это физическое явление особенно заметно на крупных двигателях. При этом может образоваться замкнутая цепь тока через подшипники, что при неблагоприятном стечении обстоятельств приводит к повреждению подшипников высокочастотными емкостными импульсами тока. Для исключения этой опасности в двигателях, питающихся от преобразователя, рекомендуется изолировать подшипники на стороне NDE.
Изолированный подшипник является стандартом для всех двигателей 1LA8, предназначенных для работы с преобразователем.
В двигателях серии 1LG4/1LG, начиная с габарита 280 и выше изолированный подшипник на стороне NDE поставляется в качестве опции (L27). В двигателях серии1PH7 и 1PL6, начиная с габарита 180 и выше изолированный подшипник на стороне NDE поставляется в качестве опции (L27).
Недостаточная группировка может привести к переводу тока заземления ротора через вал двигателя на подключенную нагрузку. Во избежание возникновения такого подшипникового тока следует обеспечить эффективное заземление корпуса двигателя, например, при помощи экранированного кабеля. Корпус двигателя и корпус Силового модуля или Двигательного модуля могут подключаться с наименьшим сопротивлением к высокочастотному току заряда/разряда.
Для этого рекомендуется использовать симметричный экранированный трехжильный кабель с проводником РЕ, установленным симметрично вокруг проводников.
Реакторы двигателя применяются для уменьшения всех подшипниковых токов, описанных выше.
Использование двигателей с взрывобезопасной оболочкой
Асинхронные двигатели Siemens серии 1MJ могут быть использованы как взрывозащищенные с взрывобезопасной оболочкой EEx de IIC при питании как от сети, так и от Силовых или Двигательных модулей.
В дополнение к общим принципам тестирования, двигатели 1MJ должны быть оборудованы термисторами.
При питании от преобразователя максимальный допустимый момент для двигателей 1MJ должен быть уменьшен, используя нагрузочную характеристику, когда используется по классу нагревостойкости B, также как двигатели 1LA аналогичной мощности.
Штатная клеммная коробка 1MJ - с "улучшенной безопасностью" типа защиты EexeII