
Motion Control Basic
Для технологического пакета Motion Control Basic требуется лицензия.
Используя этот технологический пакет можно осуществлять регулирование привода по скорости.
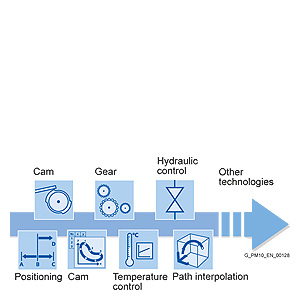
Технологические функции: Motion Control Basic
Задание скорости
Задание по скорости может задаваться из программы, например, для двигателя намотки.
Кулачки
Следующие кулачки могут быть использованные:
- путевой выключатель
- Кулачок типа «путь-путь»
- Кулачок типа «путь-время»
- Кулачок типа «путь-время» с максимальной длительностью включения
- Счетный кулачок
- Переключение при восходящем/ падающим фронтом
Считывание состояния кулачка может происходить через:
- внутренние переменные величины
- стандартные цифровые выходы (SIMATIC S7-300, ET 200...)
Следующие сигналы могут использоваться в качестве опорных точек для переключений выходных кулачков:
- Заданные значения для реальных и виртуальных осей
- Истинные значения реальных осей и внешних датчиков
- Внешних датчиков
Считывание истинного значения с внешнего датчика
Истинное значение положение оси может быть измерено с помощью внешнего датчика.
Дополнительна информация:
Техническую информацию см. в главе "Function Overview"
Данные для заказа см. в "Runtime Software/General"
Технологические функции: Позиционирование – POS
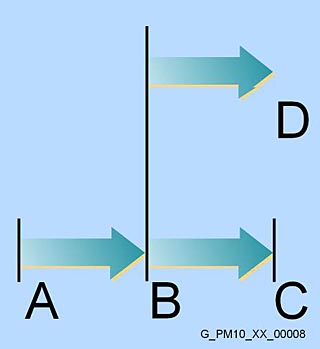
Технологический пакет позиционирование необходимо лицензировать, он обеспечивает следующую функциональность:
- Позиционирование осей, регулируемых по положению:
Оси могут управляться по отдельности без интерполяции, путём указания, например:- имени оси
- положения
- скорости
- ускорений разгона/ торможения, рывка
- условия перехода к следующему движению
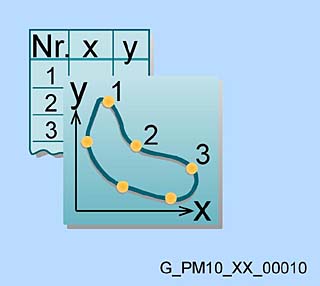
- Профиль движения оси, определённый по кулачкам:
- Положение по времени
- Скорость по времени
- Скорость по положению
- Регулирование силы и давления оси:
- Непосредственное переключение между позиционированием и регулированием давления, и наоборот
- Ограничение силы и давления для оси
- Профили силы и давления, задаваемый кулачками:
- для замкнутого регулирования и ограничений
- сила / давление по времени
- сила / давление по положению
- Перемещение в фиксированное положение
- остановка при достижении границы перемещения
- остановка при достижении ограничения по моменту
- остановка с определенным моментом
- Перемещение с настраиваемым ограничением момента
- Программируемое управление движения:
Программы перемещений могут назначаться на различные уровни исполнения, такие как, циклические, последовательные,
управляемые по прерываниям или по времени. - Независимое, стирающие предыдущие, и наложенное движение:
Могут быть следующие движения:- независимые, ось останавливается между движениями (точное позиционирование)
- стирающие предыдущие, ось переходит к выполнению следующего движения когда начинается фаза торможения
- Дополнительное движение может совмещаться с текущим движением, например, активное позиционирование может совмещаться с компенсирующим движением
- Синхронный страт осей позиционирования:
Оси позиционирования могут стартовать синхронно.
Поддерживаются следующие типы осей:- Линейная ось, вращательная ось
- Виртуальная ось
- Реферирование:
- Поддерживаются следующие типы реферирования:
- По концевому выключателю и нулевой метки датчика
- Только по концевому выключателю
- Только по нулевой метки датчика
- Задание точки реферирования
- Измерение на лету:
Эта функция используется для сохранения текущего истинного значения. Измерение осуществляется посредством переключения значения на измерительном входе. Истинное значение может быть вычислено в пользовательской программе. Эта функция может быть использована, например, для изменения текущего движения. - Обработка ошибкок датчика, 2 датчика:
Для оси могут назначаться до 2 датчиков:- При регулировании положения только один датчик активен в любой момент.
- Переключение между датчиками может происходить «на лету».
- Истинное значение не активного датчика может быть прочитано из прикладной программы, например для специального контроля.
Дополнительная информация:
Техническую информацию см. в главе "Function Overview"
For ordering data, see "Runtime Software/General"
Технологические функции: синхронизация / электронный
редуктор – GEAR
Технологический пакет электронный редуктор необходимо лицензировать, он обеспечивает следующую функциональность, в дополнении к функциям реализованным в технологическом пакете позиционирование:
- Угловая синхронизация, электронный редуктор:
Гарантируется стабильная и длительная синхронизация углового положения нескольких осей. Передаточное отношение
может устанавливаться с маленьким шагом. - Ведущая ось:
Ведомая ось может следовать движению нескольких ведущих осей. Переключение может осуществляться на лету (должна
указываться динамика переключения).
В качестве ведущих осей могут использоваться следующие типы осей:- Виртуальная ось:
Виртуальная ось существует только в блоке управления и, следовательно, не имеет никакого реального привода, двигателя и датчика. Виртуальная ось управляется также как и реальная с помощью команд. Контроллер управления движением рассчитывает заданные значения, которые могут использоваться в качестве ведущее значение для синхронного движения. - Реальная ось:
Реальная ось управляет реальным приводом, двигателем, датчиком. Значение задания, равное истинному значению положения этой оси может использоваться как ведущее значение для синхронного движения остальных осей - Внешний датчик:
- Виртуальная ось:
Истинное значение внешнего датчика может использоваться как ведущее значение для синхронного движения.
- Связь заданного, а также истинного значений с компенсацией запаздываний.
- Угловое положение осей и передаточное отношение электронного редуктора могут изменяться во время работы.
- Включение/выключение электронной связи осей:
Ведомые оси могут останавливаться на один такт или двигаться только один такт, чтобы, например, удалить бракованное
изделие. Эта функция может гибко применяться при программировании синхронного движения осей. - Синхронизации и десинхронизация:
Ведомые оси могут быть синхронизированы или десинхронизированы с ведущей осью, которая может двигаться или находиться в покое. Указывается смещение относительно положения ведущей оси. Имеются различные режимы синхронизации (по длине и по времени) и начала синхронизации осей. - Наложение синхронизации:
Позиционирование или другое синхронное движение может быть выполнено во время синхронной работы. - Распределенная синхронизация, т.е. синхронная работа различных устройств (нескольких устройств управления). Ведущая ось на ведущем устройстве PROFIBUS, ведомые оси – на ведомых (Slave) устройствах. Запаздывания компенсируются автоматически.
Дополнительная информация:
Технологические функции: электронный кулачок – CAM
Технологический пакет электронный кулачек необходимо лицензировать, он обеспечивает следующую функциональность, в дополнении к функциям реализованным в технологическом пакете позиционирование и электронный редуктор:
- Функции кулачков:
- Определение через таблицы опорных точек или полинома (до 6 степени) с тригонометрическими функциями
- Используемые правила движения по VDI 2143
- Переход между точками / полиномами: линейный, с кубическими сплайнами, сплайнами Безье
- Масштабирование, сдвиг и переключение функций кулачков даже во время движения: Положение ведущей или ведомых осей, используемых функциями кулачков, может масштабироваться или смещаться во время работы.
Текущий (активный) кулачок может быть переключён на другой кулачок даже во время работы. - Наложение 2-х синхронизированных кулачков
Кулачки могут создаваться и изменяться в системе инжиниринга SCOUT или прикладной программой во время работы.
Технологический пакет регулирования температуры – SIMOTION Tcontrol
Технологические функции регулятора температуры
Основой регулятора технологического пакета регулирования температуры является ДПИД- регулятор. Можно настроить и сконфигурировать регуляторы только нагрева или только охлаждения, а также комбинированные регуляторы нагрева/охлаждения.
Использование и расширение функциональности технологического пакета TControl поясняется на примере применения (A).
Пример применения предлагает функциональные интерфейсы для приложений и интерфейсы данных для систем визуализации и является составной частью функциональной библиотеки SIMOTION, которая включена в объеме поставки SIMOTION SCOUT.
Для каждого канала температуры доступны различные, свободно выбираемые функции (отмечены соответствующие функции, использованные в примере применения):
- Каждый канал температуры может конфигурироваться либо как секция нагревания, либо как секция охлаждения, либо как комбинированная секция нагрева/охлаждения.
- Регуляторы используют либо ПИД или ДПИД-алгоритмы регулирования, либо опциональную функциональность зон регулирования.
- В ручном режиме управления в качестве выходной величины выдаётся значение, задаваемое пользователем.
- Для каждого регулятора можно выбрать свой режим работы. Таким образом, Вы можете переключать выход на фиксированное значение, например.
Имеются следующие режимы работы регуляторов:- замкнутое регулирование по заданному значению (заданию)
- замкнутое регулирование по уменьшенному заданию(A);
- измерение истинного значения и выдача значения, устанавливаемого вручную;
- измерение истинного значения и выдача 0;
- самонастройка
- измерение истинного значения и выдача среднего значения (A) (замена значения в случае ошибки)
- Измерение и обработка истинного значения
- Проверка на соответствия каждого нового значения и коррекция перед соответствующей фильтрацией измеренных значений
- Фильтрация (звеном PT1)
- Получение и обработка заданного значения
- Переключение по команде между 2-мя заданными значениями (A)
- Сглаживание заданного значения задатчиком интенсивности (A)
- Подготовка и выдача воздействующего сигнала
- Цифровой широтно-регулируемый сигнал
- Ограничение минимальной длительности импульса путём интеграции потерянных импульсов
- Выходное значение, задаваемое вручную (ручной режим работы)
- Ограничение управляющих воздействий
- Замена значения (вычисляется динамически)
- Самонастройка регуляторов нагрева
- Гарантирует быстрый запуск без перерегулирования и поддержание заданного значения без длительных отклонений
- Самонастройка может запускаться для всех желаемых каналов одновременно, чтобы обеспечивать оптимальное измерение параметров даже в сильно связанных температурных секциях..
- Контроллер высокотемпературного канала
- Пусковая характеристика (A)
- Функции мониторинга и контроля
- Контроль истинного значения путём определения допустимых диапазонов. Внутренний и внешний диапазоны допуска могут определяться независимо друг от друга в абсолютном или относительном выражении.
- Контроль измерительных цепей для повышения надежности во время эксплуатации.
- Проверка на соответствие.
- Функции аварийных сообщений.
- Таймер на 7 дней (A)
Таймер на 7 дней (A)
Дополнительная информация:
Техническую информацию см. в главе "Function Overview"
For ordering data, see "Runtime Software/General"