

Deprecated: Function eregi() is deprecated in /home/h101150-2/siemens71.ru/docs/new/cat.php on line 184
Most production machines use digital communication bus systems. These handle the communication between the control level, the machine control and the executing components, i.e. the sensors and actuators. These are two types of communication: process communication and data communication.
Process communication
Process communication involves cyclically transmitting control data and setpoints. The quantity of transfer data is comparatively small. For example, a drive can communicate with between 4 and 32 bytes. The number of connected sensors and actuators is usually specified by the configuration which makes the bus cycle of process communication very constant.
Data communication
Data communication is often required for engineering and is not directly linked to the execution of the production process. Data are sporadically (acyclically) exchanged with connected devices. The volume of this communication can be very large with over 100 bytes per device and communication task.
Bus cycle
The bus cycle comprises process communication and data communication. The cycle of the bus system is much shorter without data communication. Some say: the bus cycle breathes. However, this breathing is unsuitable for highly accurate applications in drive technology.
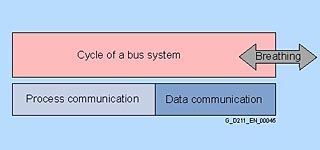
Communication types of a bus system
Requirements of drive controls
Most modern drives have a digital closed-loop control. This closed-loop control ensures that the controlled variable of the drive, for example the speed or position, are achieved and maintained. This type of digital closed-loop control comprises several intertwined controls (position, speed, current, ...). These must be matched to one another, i.e. they must be synchronized. This synchronization is important to keep the controls stable and to accurately maintain the controlled variable and/or to achieve it quickly. If some of the components of the closed-loop control are located outside the drive, a bus system must be used to manage the communication between these components. This bus system must be as synchronized as the closed-loop controls. This is referred to as isochronous operation. For drives in the area of Motion Control Systems isochronous operation must be extremely quick and very accurate. It ensures that the length of the bus cycle deviates only very slightly. This is then no longer referred to as the breathing of the bus cycle (large deviations), but as jitter (small deviations). Acceptable values are <1 µs. This synchronization is achieved through clock signals.
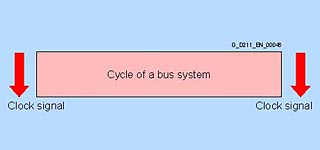
Constant bus cycle
So that a bus system can be used for Motion Control applications it must permit process communication and isochronous operation. An additional bus system is often used for data communication. PROFIBUS and PROFINET can combine all of these requirements in a single bus system. Industrial Ethernet, the predecessor of PROFINET, does not fulfill the requirements with respect to real-time communication.
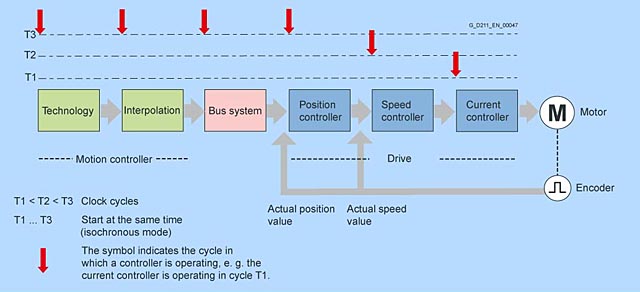
The principle of digital drive controls