
PROFINET device concept
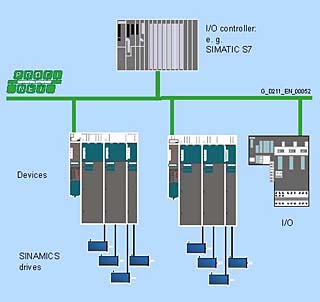
PROFINET distinguishes between the controller and devices assigned to it. These are initialized and parameterized by the controllers on power-up. The controller and its devices together constitute a PROFINET I/O system (compare master/slave system for PROFIBUS).
For PROFINET, cyclic communication between an I/O controller and its I/O devices is performed in the same way as for PROFIBUS over the process image. The process image is updated cyclically, depending on the requirements and device characteristic this takes place in real-time (RT, devices are typically distributed I/O devices) or isochronous real-time (IRT, devices are typically servo drives). In addition, PROFINET permits communication between controllers and devices of different I/O systems.
PROFINET IO with RT for simple standard drive applications
With typical cycle times of between 4 ms and 10 ms, PROFINET IO with RT offers the same performance characteristics as PROFIBUS as regards cyclic data transmission.
With this performance level, all standard drive applications belonging to PROFIdrive application categories 1 to 3 can be automated, i.e. those categories requiring the specification of speed, torque and current setpoints or target positions which do not need to be linked isochronously.
PROFINET IO with IRT for Motion Control
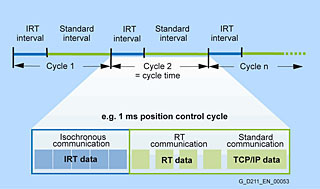
In this case, a Motion Control system (e.g. SIMOTION) controls or synchronizes axes using the PROFINET network. This requires cyclic, isochronous data exchange with the drives. PROFINET IO with IRT fulfils this requirement. The communication cycle is subdivided into different, time-specific channels for this purpose. The first channel is used for isochronous real-time communication (IRT), followed by real-time communication (RT) and standard TCP/IP communication. By configuring the application, e.g. synchronous operation of two axes, the IRT messages are determined implicitly and the corresponding configuration data are generated.
The optimum time sequence of the individual messages for each network section is calculated with a special algorithm which takes the topology into account. This permits a switch to forward the IRT messages without delay from the input port to the specified output port and then to the target device.
Transition from PROFIBUS to PROFINET
The functional interface between the controller and the SINAMICS drives for PROFINET and PROFIBUS is defined by the PROFIdrive drive profile V4 of PROFIBUS International. It is not necessary to change an application program for the transfer between PROFIBUS and PROFINET.
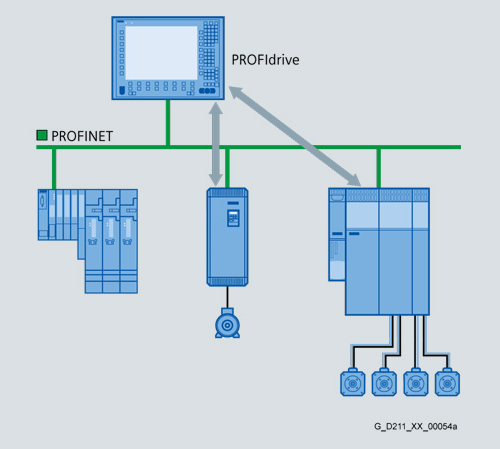
PROFINET with PROFIdrive
Motion Control concepts with PROFINET
With SINAMICS, PROFINET supports the implementation of different automation structures. Distributed drive-based Motion Control concepts (e.g. with SIMOTION D) or central architectures with a control (e.g. SIMOTION P) are supported in the same way as distributed automation solutions with modular automation components.
Central Motion Control architecture
Distributed Motion Control architecture
PROFINET interface on SINAMICS
- SINAMICS S with a CU320 Control Unit and a CBE20 Communication Board
The CU320 Control Unit on SINAMICS S is linked to the PROFINET IO network via the CBE20 Communication Board. The CBE20 Communication Board includes the PROFINET ASIC ERTEC400.- 4 ports with one RJ45 socket each
- Integrated 4-port switch
- 100 Mbit/s full duplex
- PROFINET IO device
- PROFINET IO with RT and IRT
- TCP/IP communication to engineering
- SIMOTION D
The SIMOTION D4x5 are linked to the PROFINET IO network via the CBE30 Communication Board. The CBE30 Communication Board includes the PROFINET ASIC ERTEC400.- 4 ports with one RJ45 socket each
- Integrated 4-port switch
- 100 Mbit/s full duplex
- PROFINET IO controller
- PROFINET IO with RT and IRT
- Standard TCP/IP, UDP communication
- PG/OP communication for connection of HMI and PG, IT communication